ЧЁјТРЕПўЈә

 ёрОДҪЬЈ¬ ДРЈ¬1956Дк4ФВЙъЈ¬І©КҝЈ¬Очұұ№ӨТөҙуС§»ъөзС§ФәҪМКЪЈ¬І©КҝЙъөјКҰЈ¬Очұұ№ӨТөҙуС§№ъјТ№ӨҝЖ»ъРө»щҙЎҝОіМҪМС§»щөШёәФрИЛЈ¬»ъРөФӯАн№ъјТҫ«Ж·ҝОіМёәФрИЛЎЈ ёрОДҪЬЈ¬ ДРЈ¬1956Дк4ФВЙъЈ¬І©КҝЈ¬Очұұ№ӨТөҙуС§»ъөзС§ФәҪМКЪЈ¬І©КҝЙъөјКҰЈ¬Очұұ№ӨТөҙуС§№ъјТ№ӨҝЖ»ъРө»щҙЎҝОіМҪМС§»щөШёәФрИЛЈ¬»ъРөФӯАн№ъјТҫ«Ж·ҝОіМёәФрИЛЎЈ
ЦчТӘҙУКВ»ъРөЙијЖј°АнВЫС§ҝЖЎў»ъРөЙијЖЦЖФмј°ЧФ¶Ҝ»ҜәН»ъРөөзЧУЧЁТөҪМС§УлҝЖСР№ӨЧчЎЈЦчҪІЎ°»ъРөФӯАнЎұЎўЎ°»ъРөЙијЖЎұөИұҫҝЖЙъҝОіМј°Ў°ВМЙ«ІъЖ·ЙијЖЎұЎўЎ°·ВЙъ»ъЖчИЛС§ЎұөИСРҫҝЙъҝОіМЎЈСРҫҝ·ҪПтОӘ»ъ№№С§Ул»ъЖчИЛ»ъ№№С§ЎўРВРНҙ«¶ҜЎў»ъРө¶ҜБҰС§әН·ВЙъ»ъЖчИЛЎЈ
ЦчіЦ№ъјТЧФИ»ҝЖС§»щҪрПоДҝ2ПоЈ¬ЦчіЦ№ъјТЎ°863ЎұјЖ»®ПоДҝ1ПоЈ»ЦчіЦ№ъјТ»ъРө»щҙЎҪМС§»щөШөИ№ъјТј¶ҪМС§ПоДҝ6ПоЈ¬КЎј¶3ПоЈ»·ўұнҝЖСРј°ҪМС§ВЫОД50УаЖӘЈ»»сЧЁАы4ПоЈ¬»сИнјюЦшЧчИЁөЗјЗ5ПоЈ»ұаЦш»ъРөФӯАнҪМІДЎўөзЧУј°НшВзҪМІД№І10УаІҝЎЈ
ПИәу»сҪМУэІҝҝЖјјҪшІҪ¶юөИҪұ1ПоЎў№ъјТј¶ҪМС§іЙ№ы¶юөИҪұ1ПоЎўКЎҪМС§іЙ№ыМШөИҪұ1ПоәН¶юөИҪұ2ПоЈ»»сұҰёЦУЕРгҪМКҰҪұЈ»№ъ·АҝЖ№ӨОҜОҜКфёЯРЈЎ°УЕРгҪМКҰЎұЎўЙВОчКЎЎ°УЕРгҪМКҰЎұЎўКЧҪмЎ°ЙВОчКЎҪМС§ГыКҰҪұЎұј°өЪИэҪмёЯөИѧУЎ°№ъјТҪМС§ГыКҰҪұЎұөИЎЈ
 ҪМУэј°№ӨЧчҫӯАъЈә ҪМУэј°№ӨЧчҫӯАъЈә
1978Дк3ФВҝјИлОч°ІАн№ӨҙуС§»ъРөЙијЖУлЦЖФмЧЁТөЎЈ
1982Дк1ФВ»с№ӨѧѧКҝС§О»ЎЈ
1987Дк3ФВ»с»ъРөС§ЧЁТө№ӨС§Л¶КҝС§О»Ј¬Н¬ДкБфРЈИОҪМЈ¬ҙУКВ»ъРөС§ҝЖҪМС§УлҝЖСР№ӨЧчЎЈ
Йз»бјжЦ°Јә
1ЎўЦР№ъ»ъРө№ӨТөҪМУэРӯ»б»ъөзС§ҝЖҪМС§ОҜФұ»бОҜФұЎЈ
2ЎўОчұұөШЗшфЯЙВОчКЎёЯРЈ»ъРөФӯАнСРҫҝ»бёұАнКВіӨЎЈ
3ЎўИ«№ъ»ъРөФӯАнҪМС§СРҫҝ»бАнКВЎЈ
4ЎўЙВОчКЎЖХНЁёЯөИѧУҪМС§ГыКҰЎЈ
ЦчҪІҝОіМЈә
ұҫҝЖЙъЈәЎ¶»ъРөФӯАнЎ·ЎўЎ¶»ъРөЙијЖ»щҙЎЎ·Ј»
СРҫҝЙъЈәЎ¶ВМЙ«ІъЖ·ЙијЖЎ·ЎўЎ¶іЭВЦДцәПФӯАнЎ·ЎўЎ¶·ВЙъ»ъЖчИЛС§Ў·ЎЈ
 ҝЖС§СРҫҝЈә ҝЖС§СРҫҝЈә

СРҫҝ·ҪПтЈә
ЦчТӘҙУКВ»ъРөЙијЖј°АнВЫС§ҝЖЎў»ъРөЙијЖЦЖФмј°ЧФ¶Ҝ»ҜәН»ъРөөзЧУЧЁТөҪМС§УлҝЖСР№ӨЧчЎЈ
іРөЈөДҝЖСРПоДҝЗйҝцЈә 
ЦчіЦ№ъјТЧФИ»ҝЖС§»щҪрПоДҝ2ПоЈ¬ЦчіЦ№ъјТЎ°863ЎұјЖ»®ПоДҝ1ПоЈ¬ЦчіЦ№ъјТј¶ҪМС§ПоДҝ6ПоЎЈ
ИП¶ЁіЙ№ыЈә
1 ТәС№Зэ¶ҜМшФҫ»ъЖчИЛөДНИІҝ»ъ№№ ёрОДҪЬ;ХЕУАәм;ЦЈАЧ;ХФ¶«Аҙ;ХЕ№ъРЫ Очұұ№ӨТөҙуС§ 2019
2 Т»ЦЦ»ЎіЭЧ¶іЭВЦЙијЖ·Ҫ·Ё ёрОДҪЬ;НхАцЖҪ;СоҝӘЖҪ;ВнПюС©;іМҫІ Очұұ№ӨТөҙуС§ 2018
3 БҪЧФУЙ¶И·ВЙъөҜМш»ъЖчИЛ ёрОДҪЬ;ХЕГъ;іВПюәм;Со·Ҫ Очұұ№ӨТөҙуС§ 2016
4 өҜМш»ъЖчИЛөДДЬБҝҙжҙўУлКН·ЕЧ°ЦГ ёрОДҪЬ;°ШБъ;іВПюәм;ХЕУАәм Очұұ№ӨТөҙуС§ 2016
5 МшФҫ¶ИҝЙөчөД·ВЙъөҜМш»ъ№№ ёрОДҪЬ;Оә¶ШОД;ёЯҪЁ;іВПюәм;іМҫІ;БхТаСу Очұұ№ӨТөҙуС§ 2011
6 ҝЙөчКҪОўРНөШПВ№ЬөАҫтҪшө¶Н· ёрОДҪЬ;НхЦЫ;ХЕБЦ;ІЬРЎұҰ;әъУсБъ;ЛпАцҫь;ОДС§ Очұұ№ӨТөҙуС§ 2011
7 ҝЙҝШУАҙЕКҪОРБчМУЙъЧ°ЦГ ёрОДҪЬ;ЛОөӨБъ;НхУўО°;ХЕБЦ;ПтУВ Очұұ№ӨТөҙуС§ 2010
8 Т»ЦЦЧФЦчёҙО»ВЦНИКҪөҜМшёҙәПТЖ¶Ҝ»ъЖчИЛ ёрОДҪЬ;Оә¶ШОД;Іс»Ф;·®ЦШЗм;іВЕуНю;ёЯҪЁ Очұұ№ӨТөҙуС§ 2010
9 ҫИЙъ·АөБНш ёрОДҪЬ;НхЦЫ;БхҪЁЖҪ Очұұ№ӨТөҙуС§ 2010
10 Т»ЦЦЕАұЪ»ъЖчИЛөДФЛ¶ҜОьёҪЧ°ЦГ ёрОДҪЬ;РмЦҫјС;ЦЬАЧ;ЛжТшБл;РмҪЎ;ЦЬЮИі¬ Очұұ№ӨТөҙуС§ 2010
11 ҙўДЬҝЙөчөДіЭВЦ-ОеёЛ·ВЙъөҜМш»ъ№№ ёрОДҪЬ;Іс»Ф;Со·Ҫ;БхТаСу;Оә¶ШОД;іВПюәм Очұұ№ӨТөҙуС§ 2009
12 ·З¶ФіЖіЭВЦБщёЛ·ВЙъөҜМш»ъ№№ ёрОДҪЬ;°ШБъ;іВПюәм;Со·Ҫ;ХЕГъ Очұұ№ӨТөҙуС§ 2009
13 Т»ЦЦЛ®ГжёЎЙъЦІОпҙтАМЧ°ЦГ ёрОДҪЬ;БхәЈМО;АоСо;РмЦҫјС;ХФПІ·ж;Нх»Ы Очұұ№ӨТөҙуС§ 2008
14 ҝЙөчКҪЧФККУҰ№ЬөАДЪРРЧЯ»ъ№№ ёрОДҪЬ;НхЦЫ;ХЕБЦ;ІЬРЎұҰ;әъУсБъ;ЛпАцҫь;ОДС§ Очұұ№ӨТөҙуС§ 2007
15 ·ВҙьКуНИРОМшФҫ»ъЖчИЛҪб№№ ёрОДҪЬ;ЙтЖҪ;ХЕОДМО;ҪӯВь Очұұ№ӨТөҙуС§ 2007
16 Т»ЦЦҝЙ»ШКХІјёжЦҪөДІјёжАё ёрОДҪЬ;Лпәгі¬;ЛХИфұу;ГП·Іҫь;ВЮәЖ Очұұ№ӨТөҙуС§ 2007
17 Т»ЦЦЧйәПКҪ¶а№ҰДЬҫИФ®№ӨҫЯ ёрОДҪЬ;ОДС§;ВҪәмСЗ;ХЕАЦ;ОәІ©·Й;ХЕәгСф;БхБъЦй Очұұ№ӨТөҙуС§ 2007
18 Т»ЦЦ»ъЖчИЛ·ВЙъЦъМшЧ°ЦГ Іс»Ф;ёрОДҪЬ;Оә¶ШОД;ОвҪрПг;·®ЦШЗм;іВЕфНю Очұұ№ӨТөҙуС§ 2010
19 МшФҫ»ъЖчИЛ¶ҜБҰПөНі ХЕОДМО;АоҪЁ»Ә;ёрОДҪЬ;ҪӯВь;ЙтЖҪ Очұұ№ӨТөҙуС§ 2007
 ·ўГчЧЁАыЈә ·ўГчЧЁАыЈә

·ўГч№«ҝӘЈә
[1]ёрОДҪЬ, ҪрКҜҝӘ, Бхұу, ХФ¶«Аҙ, АоУсЦщ, НхЧҝ. »щУЪЗъБәөДёХИб»мәППҘ№ШҪЪНв№ЗчАөДЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN118797755A, 2024-10-18.
[2]ёрОДҪЬ, Бхұу, НхЧҝ, ХФ¶«Аҙ, АоУсЦщ, ҪрКҜҝӘ. Т»ЦЦ»щУЪөҘЧФУЙ¶ИұХБҙБ¬ёЛ»ъ№№өДЛДЧг»ъЖчИЛ[P]. ЙВОчКЎ: CN118083004A, 2024-05-28.
[3]ёрОДҪЬ, ҪрКҜҝӘ. Т»ЦЦ·ВЙъјЎИвұдёХ¶ИНв№ЗчА»ъРөЧ°ЦГ[P]. ЙВОчКЎ: CN117464647A, 2024-01-30.
[4]ёрОДҪЬ, МЖЛ«И«, ХЕУАәм, ХЕәкЦЗ, Нхнө. Т»ЦЦҫЯУРіӨ¶ИЧФККУҰ№ҰДЬөДјҜЦРИб¶ИКҪИбЛіҪВБҙЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN115758597A, 2023-03-07.
[5]ёрОДҪЬ, ДӘРЎҫк, ИОТЭ·Й, іВ·Й. Т»ЦЦөҘөз»ъЗэ¶ҜөД·В»ИіжМшФҫЖЛТнЛ«ФЛ¶ҜДЈКҪ»ъ№№[P]. ЙВОчКЎ: CN114212159A, 2022-03-22.
[6]ёрОДҪЬ, Бхұу, АоКчҫь. Т»ЦЦВЭРэҪ°Цч¶ҜұдҫШ»ъ№№[P]. ЙВОчКЎ: CN113320686A, 2021-08-31.
[7]ёрОДҪЬ, НхҫэйӘ, ХЕУАәм, ЦмРсТ«, Нх¶юББ. »щУЪЦёҪЪКҪёХИбсоәПөДұдРОТнәуФөЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN112182760A, 2021-01-05.
[8]ёрОДҪЬ, НхҫэйӘ, ХЕУАәм, ЦмРсТ«, ХЕРс. »щУЪЦёҪЪКҪБ¬ёЛЗэ¶ҜөДәуФөұдНд¶И»ъ№№[P]. ЙВОчКЎ: CN112141318A, 2020-12-29.
[9]ёрОДҪЬ, АоУсЦщ, ХЕУАәм. Т»ЦЦ»щУЪёХРФ¶аБ¬ёЛ»ъ№№Зэ¶ҜөДұдРОТнҪб№№ЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN111597632A, 2020-08-28.
[10]ёрОДҪЬ, АоУсЦщ, ЧЮЦҫ»Ә, ХЕРс, ХЕСЗЗа, ХЕЧУ°ә. Т»ЦЦ»щУЪіЭВЦОеёЛ»ъ№№Зэ¶ҜөД»ъТнЗ°ФөұдНд¶И»ъ№№[P]. ЙВОчКЎ: CN111470030A, 2020-07-31.
[11]ёрОДҪЬ, ХФ¶«Аҙ, БхІ©, ¶ӯөдұл, ДӘРЎҫк, Нх№ъұу, ЧЮЦҫ»Ә. Т»ЦЦС№БҰІЁ¶ҜҪПРЎөДЧйәПРН»оИыКҪРоДЬЖч[P]. ЙВОчКЎ: CN110145502A, 2019-08-20.
[12]ёрОДҪЬ, БхІ©, ЧЮЦҫ»Ә, БхЛјХЬ. Т»ЦЦ·ВЙъНИКҪөҜМшКөСйЧ°ЦГ[P]. ЙВОчКЎ: CN110132557A, 2019-08-16.
[13]ёрОДҪЬ, ХЕЧУ°ә, ХЕСЗЗа, ЦЬИШТЧ, ЦмРсТ«. Т»ЦЦ»щУЪMATLABУлAPDLөДИбРФ»ъ№№БӘәПНШЖЛУЕ»Ҝ·Ҫ·Ё[P]. ЙВОчКЎ: CN110059379A, 2019-07-26.
[14]ёрОДҪЬ, ДӘРЎҫк, ЙтҲҗАЪ, ХФ¶«Аҙ. ·ВәЈЕёЖЛТн»ъ№№[P]. ЙВОчКЎ: CN109693788A, 2019-04-30.
[15]ёрОДҪЬ, ХЕЧУ°ә, ХЕСЗЗа, ЦЬИШТЧ, АоУсЦщ. Т»ЦЦУГУЪұдРО»ъТнРОұдІОКэІвКФКФСйМЁ[P]. ЙВОчКЎ: CN109502052A, 2019-03-22.
[16]ёрОДҪЬ, ХЕСЗЗа, ХЕЧУ°ә, АоУсЦщ, ЧЮЦҫ»Ә, ХЕУАәм. Т»ЦЦ»щУЪИбЛі»ъ№№өДҝЙұдНд¶И»ъТнәуФө[P]. ЙВОч: CN108839788A, 2018-11-20.
[17]ёрОДҪЬ, НхҪЁНЈ, ¶ӯөдұл, БхЛјХЬ, ХФХс·Й, ЙЫҝЎ·Й. Т»ЦЦұдёЛіӨіЭВЦОеёЛ»ъ№№Цчұ»¶ҜРНхЧ№ШҪЪјЩЦ«[P]. ЙВОч: CN108836583A, 2018-11-20.
[18]ёрОДҪЬ, АоСа, Н¬РВРЗ, АоУсЦщ, ХЕУАәм. Т»ЦЦУГИбРФ·Еҙу»ъ№№КөПЦҝХјдПа»ъөчҪ№өД·Ҫ·Ё[P]. ЙВОч: CN108761961A, 2018-11-06.
[19]ёрОДҪЬ, ХЕУАәм, ЦЈАЧ, ХФ¶«Аҙ, ХЕ№ъРЫ, НхХЬ, ХЕНю. ТәС№Зэ¶ҜМшФҫ»ъЖчИЛөДНИІҝ»ъ№№[P]. ЙВОч: CN107323564A, 2017-11-07.
[20]ёрОДҪЬ, ХЕНю, ЦЈАЧ, ХЕ№ъРЫ, ХЕҪрНъ. Т»ЦЦҝЙҝХЦРөчЧЛј°ВдөШДЬБҝ»ШКХөДЧг№цКҪјдРӘөҜМш»ъЖчИЛ[P]. ЙВОч: CN107089275A, 2017-08-25.
[21]ёрОДҪЬ, ДӘРЎҫк, НхЙЩҙП, ХФ¶«Аҙ. Т»ЦЦОўөз»ъЗэ¶ҜЛДёЛЦұПЯ·ВЙъМшФҫ»ъ№№[P]. ЙВОч: CN106184445A, 2016-12-07.
[22]ёрОДҪЬ, ХФ¶«Аҙ, ХЕОДАЪ, БхІ©, ¶ӯөдұл. Т»ЦЦ»щУЪТәС№Зэ¶ҜөДіЭВЦОеёЛМшФҫхЧ№ШҪЪ[P]. ЙВОч: CN105966483A, 2016-09-28.
[23]ёрОДҪЬ, Оә¶ШОД, »ЖіҝјҪ, ХЕОДАЪ, ЙЈСф. Т»ЦЦЧФЦчёҙО»ИэөөұдЛЩөҜМшТЖ¶Ҝ»ъЖчИЛ[P]. ЙВОч: CN105172927A, 2015-12-23.
[24]ёрОДҪЬ, АјәйІЖ, ХЕОДАЪ, ХЕСЗЗа, ЗаНю, РмАЪ. Т»ЦЦДЪИј»ъЗэ¶ҜөД·ВЙъМшФҫ»ъЖчИЛ[P]. ЙВОч: CN105059412A, 2015-11-18.
[25]ёрОДҪЬ, ЦЬСТ, ЦЬі¬, ЦЬКҜ, Аојш№в, ХІМЪ, БәПюСф. Т»ЦЦіЭВЦДцәПҝШЦЖКҪЧФјмІв·ӯЧӘ·АХрҙІ[P]. ЙВОч: CN104146533A, 2014-11-19.
[26]ёрОДҪЬ, ЛпФ°ПІ, ЦЈјС, ¶ӯөдұл, ХФ¶«Аҙ. Т»ЦЦЧгөЧКЬБҰІвБҝЧ°ЦГ[P]. ЙВОч: CN104068870A, 2014-10-01.
[27]ёрОДҪЬ, ЛХУА·ј, РмЙэ, ХФ¶«Аҙ, ЦмФӘҙә, Лпі¬. Т»ЦЦДҰНР»ҜұдөөіЭВЦОеёЛ»ъ№№өДёәЦШМшФҫЧ°ЦГ[P]. ЙВОч: CN104058015A, 2014-09-24.
[28]ёрОДҪЬ, ХФ¶«Аҙ, НхІ©, КўЙӯИ», АЧИсОз, ХЕәЖ. Т»ЦЦЕАұЪ»ъЖчИЛөДёәС№ОьёҪКҪЛ«Чг[P]. ЙВОч: CN104015829A, 2014-09-03.
[29]ёрОДҪЬ, ХФ¶«Аҙ, ХЕЦш, ЛХУА·ј. Т»ЦЦЧФ¶ҜЙмЛхКҪЖыіөХЪСфЙЎ[P]. ЙВОч: CN103978876A, 2014-08-13.
[30]ёрОДҪЬ, ЛпФ°ПІ, ЦЈјС, ¶ӯөдұл. Т»ЦЦіЭВЦОеёЛ»ъ№№өДјЩЦ«ПҘ№ШҪЪ[P]. ЙВОч: CN103976807A, 2014-08-13.
[31]ёрОДҪЬ, іВиӨЗп, ОвМмәҪ. Т»ЦЦБҙМхөДКХ·ЕПөНі[P]. ЙВОч: CN103671795A, 2014-03-26.
[32]ёрОДҪЬ, іВиӨЗп, ОвМмәҪ. Т»ЦЦЖыіөұщѩ·ГжЧФ¶Ҝ·А»¬Ч°ЦГ[P]. ЙВОч: CN103660815A, 2014-03-26.
[33]ёрОДҪЬ, әъҝЎЙҪ, ә«звйӘ, СоТжјО, ВіИҪ. Т»ЦЦЧФККУҰЗеПҙЧ°ЦГ[P]. ЙВОч: CN103495584A, 2014-01-08.
[34]ЦЬСТ, ЦЬі¬, ёрОДҪЬ, Аојш№в, ЦЬКҜ, ХІМЪ, БәПюСф. Т»ЦЦ»ъРөКҪөШХрЧФјмІвЧ°ЦГ[P]. ЙВОч: CN103439737A, 2013-12-11.
[35]ёрОДҪЬ, МёР§Бъ, ГППйСЮ, ҝЬцО, РмЙэ. Т»ЦЦ»щУЪТәС№Зэ¶ҜөД»ъЖчИЛөҜМш»ъ№№[P]. ЙВОч: CN103287522A, 2013-09-11.
[36]ёрОДҪЬ, ИОжГжГ, ХФУоН®, ЦмФӘҙә, »рНіБъ. Т»ЦЦҙшУР№ӨҫЯәРөД¶а№ҰДЬЙэҪөөК[P]. ЙВОч: CN103211424A, 2013-07-24.
[37]ёрОДҪЬ, Н¬РВРЗ, РмЙэ, МёР§Бъ, »рНіБъ. Т»ЦЦёәЦШөҜМш»ъЖчИЛТәС№¶ҜБҰЧ°ЦГ[P]. ЙВОч: CN103213629A, 2013-07-24.
[38]ёрОДҪЬ, Н¬РВРЗ, ЦмФӘҙә, БхРЎУВ, ИОжГжГ, Бх№в»Ә. Т»ЦЦІЭЖәКчТ¶јсК°С№ЛхЧ°ЦГ[P]. ЙВОч: CN103202183A, 2013-07-17.
[39]ёрОДҪЬ, ХФ¶«Аҙ, Цм·ж, БхІ©, ЛХУА·ј, ЦмФӘҙә. Т»ЦЦН№ВЦКҪёәС№ОьёҪөДЕАұЪ»ъЖчИЛ[P]. ЙВОч: CN103129639A, 2013-06-05.
[40]ёрОДҪЬ, Н¬РВРЗ, БхРЎУВ, »рНіБъ, ХФмҝ, РмЙэ, МёР§Бъ, ИОжГжГ. Т»ЦЦҪҘҪшКҪКчЖӨҪХёСС№Лх»ъ[P]. ЙВОч: CN102934568A, 2013-02-20.
[41]ёрОДҪЬ, ЛпФ°ПІ, РмЙъ, МёР§Бъ. Т»ЦЦҫнС№КҪҪХёС№М»ҜіЙРН»ъ[P]. ЙВОч: CN102934569A, 2013-02-20.
[42]ёрОДҪЬ, РмЙэ, МёР§Бъ, »рНіБъ, БхРЎУВ, Бх№в»Ә. Т»ЦЦұдІХҙшКҪҙтАҰ»ъ[P]. ЙВОч: CN102934570A, 2013-02-20.
[43]ёрОДҪЬ, №щСо, НхұщРс, ХЕСо, Ао»Ыҫк, НфСЗФЛ, ВЮОД. Т»ЦЦУГУЪТВ№сөДҝЙійАӯЙмХ№№ТТВЧ°ЦГ[P]. ЙВОч: CN102835830A, 2012-12-26.
[44]ёрОДҪЬ, ВЮОД, Ао»Ыҫк, НфСЗФЛ, НхұщРс, №щСо, ХЕСо. Т»ЦЦУГУЪТВ№сөДҙжИЎҝгЧУЧ°ЦГ[P]. ЙВОч: CN102824032A, 2012-12-19.
[45]ёрОДҪЬ, БхІ©, іВҝЎУо, ВнАЩ, ХЕ»Ф. Т»ЦЦ¶а№ҰДЬФцБҰЖЖІрЧ°ЦГ[P]. ЙВОч: CN102814013A, 2012-12-12.
[46]ёрОДҪЬ, ЛпФ°ПІ, ¶ӯөдұл, №щҝӯ, АоУВХю, ёКҪЎЗа, °аҪхЗҝ. Т»ЦЦ№ыКЯЗРЛҝ»ъ[P]. ЙВОч: CN102717401A, 2012-10-10.
[47]ёрОДҪЬ, ЛпФ°ПІ, ¶ӯөдұл, АоУВХю, ЦЈјС. Т»ЦЦДЪұЪЗеПҙЖч[P]. ЙВОч: CN102698993A, 2012-10-03.
[48]ёрОДҪЬ, ВнПюС©, АоСТ, ХФмҝ, НхЕф, НтИ», ХЕФцИЁ. Т»ЦЦ·ВҙьКуМшФҫ»ъЖчИЛөДЧФККУҰұдРОҪЕ[P]. ЙВОч: CN102700648A, 2012-10-03.
[49]ёрОДҪЬ, Со—¶Фҙ, ЦЬөП, УЪәӯ, УЪОДБъ, Со·«, ХЕЙЩІ©. Т»ЦЦҫщФИЦъЗРө¶јЬ[P]. ЙВОч: CN102658566A, 2012-09-12.
[50]ёрОДҪЬ, ІЬРЎұҰ, СоЗаБъ, ЛпАцҫь, ЬЗЕфББ, әъЛЙМО. Т»ЦЦј¶ҪшКҪФцБҰЗҜ[P]. ЙВОч: CN102430796A, 2012-05-02.
[51]әООАЖҪ, РмАЕ, АЧАЩ, ёрОДҪЬ. Т»ЦЦУГУЪјӨ№вұкҝМөДЧФ¶ФҪ№јРҫЯ[P]. ЙВОч: CN102398426A, 2012-04-04.
[52]ёрОДҪЬ, АоКчҫь, ХЕ»Ф, іВЧчДЈ, ёЯҪЁ, ВнПюС©. ¶а№ҰДЬБ¬ёЛ¶ҜБҰС§КөСйЖҪМЁ[P]. ЙВОч: CN102359875A, 2012-02-22.
[53]ёрОДҪЬ, Оә¶ШОД, ёЯҪЁ, іВПюәм, іМҫІ, БхТаСу. МшФҫ¶ИҝЙөчөД·ВЙъөҜМш»ъ№№[P]. ЙВОч: CN102267502A, 2011-12-07.
[54]ёрОДҪЬ, НхЦЫ, ХЕБЦ, ІЬРЎұҰ, әъУсБъ, ЛпАцҫь, ОДС§. ҝЙөчКҪОўРНөШПВ№ЬөАҫтҪшө¶Н·[P]. ЙВОч: CN102162363A, 2011-08-24.
[55]ёрОДҪЬ, НхЦЫ, ХЕБЦ, ІЬРЎұҰ, әъУсБъ, ЛпАцҫь, ОДС§. ЧФРРЧЯКҪОўРНөШПВ№ЬөАҫтҪш»ъ[P]. ЙВОч: CN102162362A, 2011-08-24.
[56]ёрОДҪЬ, НхЦЫ, ХЕБЦ, ІЬРЎұҰ, әъУсБъ, ЛпАцҫь, ОДС§. ҝЙөчКҪЧФККУҰ№ЬөАДЪРРЧЯ»ъ№№[P]. ЙВОч: CN102128335A, 2011-07-20.
[57]ёрОДҪЬ, ХЕГъ, іВПюәм, Со·Ҫ, °ШБъ. БҪЧФУЙ¶И·ВЙъөҜМш»ъЖчИЛ[P]. ЙВОч: CN102050156A, 2011-05-11.
[58]ёрОДҪЬ, °ШБъ, іВПюәм, ХЕУАәм, Іс»Ф. өҜМш»ъЖчИЛөДДЬБҝҙжҙўУлКН·ЕЧ°ЦГ[P]. ЙВОч: CN102050157A, 2011-05-11.
[59]ёрОДҪЬ, Оә¶ШОД, Іс»Ф, ·®ЦШЗм, іВЕуНю, ёЯҪЁ. Т»ЦЦЧФЦчёҙО»ВЦНИКҪөҜМшёҙәПТЖ¶Ҝ»ъЖчИЛ[P]. ЙВОч: CN102009705A, 2011-04-13.
[60]ёрОДҪЬ, ЛОөӨБъ, НхУўО°, ХЕБЦ, ПтУВ. ҝЙҝШУАҙЕКҪОРБчМУЙъЧ°ЦГ[P]. ЙВОч: CN101961531A, 2011-02-02.
[61]ёрОДҪЬ, НхЦЫ, БхҪЁЖҪ. ҫИЙъ·АөБНш[P]. ЙВОч: CN101956516A, 2011-01-26.
[62]ёрОДҪЬ, °ШБъ, іВПюәм, Со·Ҫ, ХЕГъ. ·З¶ФіЖіЭВЦБщёЛ·ВЙъөҜМш»ъ№№[P]. ЙВОч: CN101941476A, 2011-01-12.
[63]ёрОДҪЬ, Іс»Ф, Со·Ҫ, БхТаСу, Оә¶ШОД, іВПюәм. ҙўДЬҝЙөчөДіЭВЦ-ОеёЛ·ВЙъөҜМш»ъ№№[P]. ЙВОч: CN101941477A, 2011-01-12.
[64]ёрОДҪЬ, ОДС§, ВҪәмСЗ, ХЕАЦ, ОәІ©·Й, ХЕәгСф, БхБъЦй. Т»ЦЦЧйәПКҪ¶а№ҰДЬҫИФ®№ӨҫЯ[P]. ЙВОч: CN101905846A, 2010-12-08.
[65]Іс»Ф, ёрОДҪЬ, Оә¶ШОД, ОвҪрПг, ·®ЦШЗм, іВЕфНю. Т»ЦЦ»ъЖчИЛ·ВЙъЦъМшЧ°ЦГ[P]. ЙВОч: CN101862542A, 2010-10-20.
[66]ёрОДҪЬ, НхАцЖҪ, СоҝӘЖҪ, ВнПюС©, іМҫІ. Т»ЦЦ»ЎіЭЧ¶іЭВЦЙијЖ·Ҫ·Ё[P]. ЙВОч: CN101865272A, 2010-10-20.
[67]ёрОДҪЬ, РмЦҫјС, ЦЬАЧ, ЛжТшБл, РмҪЎ, ЦЬЮИі¬. Т»ЦЦЕАұЪ»ъЖчИЛөДФЛ¶ҜОьёҪЧ°ЦГ[P]. ЙВОч: CN101804639A, 2010-08-18.
[68]ёрОДҪЬ, БхәЈМО, АоСо, РмЦҫјС, ХФПІ·ж, Нх»Ы. Т»ЦЦЛ®ГжёЎЙъЦІОпҙтАМЧ°ЦГ[P]. ЙВОч: CN101725139A, 2010-06-09.
[69]ёрОДҪЬ, Лпәгі¬, ЛХИфұу, ГП·Іҫь, ВЮәЖ. Т»ЦЦҝЙ»ШКХІјёжЦҪөДІјёжАё[P]. ЙВОч: CN101533590, 2009-09-16.
[70]ёрОДҪЬ, ЙтЖҪ, ХЕОДМО, ҪӯВь. ·ВҙьКуНИРОМшФҫ»ъЖчИЛҪб№№[P]. ЙВОч: CN101244729, 2008-08-20.
[71]ХЕОДМО, АоҪЁ»Ә, ёрОДҪЬ, ҪӯВь, ЙтЖҪ. МшФҫ»ъЖчИЛ¶ҜБҰПөНі[P]. ЙВОч: CN101244730, 2008-08-20.
[72]ёрОДҪЬ, ЛпНт, ХФјУЗе, ХЕЗЕ, УҰёЯГч, БхРсәЈ. ЧФЦъҪшІН»ъ[P]. ЙВОч: CN101081184, 2007-12-05.
·ўГчКЪИЁЈә
[1]ёрОДҪЬ, ДӘРЎҫк, ИОТЭ·Й, іВ·Й. Т»ЦЦөҘөз»ъЗэ¶ҜөД·В»ИіжМшФҫЖЛТнЛ«ФЛ¶ҜДЈКҪ»ъ№№[P]. ЙВОчКЎ: CN114212159B, 2023-07-21.
[2]ёрОДҪЬ, НхҫэйӘ, ХЕУАәм, ЦмРсТ«, ХЕРс. »щУЪЦёҪЪКҪБ¬ёЛЗэ¶ҜөДәуФөұдНд¶И»ъ№№[P]. ЙВОчКЎ: CN112141318B, 2022-11-29.
[3]ёрОДҪЬ, Бхұу, АоКчҫь. Т»ЦЦВЭРэҪ°Цч¶Ҝұдҫа»ъ№№[P]. ЙВОчКЎ: CN113320686B, 2022-11-01.
[4]ёрОДҪЬ, АоУсЦщ, ХЕУАәм. Т»ЦЦ»щУЪёХРФ¶аБ¬ёЛ»ъ№№Зэ¶ҜөДұдРОТнҪб№№ЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN111597632B, 2022-08-19.
[5]ёрОДҪЬ, АоУсЦщ, ЧЮЦҫ»Ә, ХЕРс, ХЕСЗЗа, ХЕЧУ°ә. Т»ЦЦ»щУЪіЭВЦОеёЛ»ъ№№Зэ¶ҜөД»ъТнЗ°ФөұдНд¶И»ъ№№[P]. ЙВОчКЎ: CN111470030B, 2022-08-12.
[6]ёрОДҪЬ, НхҫэйӘ, ХЕУАәм, ЦмРсТ«, Нх¶юББ. »щУЪЦёҪЪКҪёХИбсоәПөДұдРОТнәуФөЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN112182760B, 2022-06-14.
[7]ёрОДҪЬ, ДӘРЎҫк, ЙтҲҗАЪ, ХФ¶«Аҙ. ·ВәЈЕёЖЛТн»ъ№№[P]. ЙВОчКЎ: CN109693788B, 2022-05-06.
[8]ёрОДҪЬ, ХЕСЗЗа, ХЕЧУ°ә, АоУсЦщ, ЧЮЦҫ»Ә, ХЕУАәм. Т»ЦЦ»щУЪИбЛі»ъ№№өДҝЙұдНд¶И»ъТнәуФө[P]. ЙВОчКЎ: CN108839788B, 2021-08-03.
[9]ёрОДҪЬ, БхІ©, ЧЮЦҫ»Ә, БхЛјХЬ. Т»ЦЦ·ВЙъНИКҪөҜМшКөСйЧ°ЦГ[P]. ЙВОчКЎ: CN110132557B, 2020-07-14.
[10]ёрОДҪЬ, ХФ¶«Аҙ, БхІ©, ¶ӯөдұл, ДӘРЎҫк, Нх№ъұу, ЧЮЦҫ»Ә. Т»ЦЦС№БҰІЁ¶ҜҪПРЎөДЧйәПРН»оИыКҪРоДЬЖч[P]. ЙВОчКЎ: CN110145502B, 2020-05-12.
[11]ёрОДҪЬ, НхҪЁНЈ, ¶ӯөдұл, БхЛјХЬ, ХФХс·Й, ЙЫҝЎ·Й. Т»ЦЦұдёЛіӨіЭВЦОеёЛ»ъ№№Цчұ»¶ҜРНхЧ№ШҪЪјЩЦ«[P]. ЙВОчКЎ: CN108836583B, 2020-01-14.
[12]ёрОДҪЬ, ХЕУАәм, ЦЈАЧ, ХФ¶«Аҙ, ХЕ№ъРЫ, НхХЬ, ХЕНю. ТәС№Зэ¶ҜМшФҫ»ъЖчИЛөДНИІҝ»ъ№№[P]. ЙВОчКЎ: CN107323564B, 2019-03-29.
[13]ёрОДҪЬ, ХЕНю, ЦЈАЧ, ХЕ№ъРЫ, ХЕҪрНъ. Т»ЦЦҝЙҝХЦРөчЧЛј°ВдөШДЬБҝ»ШКХөДЧг№цКҪјдРӘөҜМш»ъЖчИЛ[P]. ЙВОчКЎ: CN107089275B, 2019-03-26.
[14]ёрОДҪЬ, ДӘРЎҫк, НхЙЩҙП, ХФ¶«Аҙ. Т»ЦЦОўөз»ъЗэ¶ҜЛДёЛЦұПЯ·ВЙъМшФҫ»ъ№№[P]. ЙВОчКЎ: CN106184445B, 2018-03-27.
[15]ёрОДҪЬ, Оә¶ШОД, »ЖіҝјҪ, ХЕОДАЪ, ЙЈСф. Т»ЦЦЧФЦчёҙО»ИэөөұдЛЩөҜМшТЖ¶Ҝ»ъЖчИЛ[P]. ЙВОчКЎ: CN105172927B, 2017-10-13.
[16]ёрОДҪЬ, ХФ¶«Аҙ, НхІ©, КўЙӯИ», АЧИсОз, ХЕәЖ. Т»ЦЦЕАұЪ»ъЖчИЛөДёәС№ОьёҪКҪЛ«Чг[P]. ЙВОчКЎ: CN104015829B, 2016-05-18.
[17]ёрОДҪЬ, ЛХУА·ј, РмЙэ, ХФ¶«Аҙ, ЦмФӘҙә, Лпі¬. Т»ЦЦДҰНР»ҜұдөөіЭВЦОеёЛ»ъ№№өДёәЦШМшФҫЧ°ЦГ[P]. ЙВОчКЎ: CN104058015B, 2016-05-18.
[18]ёрОДҪЬ, ЛпФ°ПІ, ЦЈјС, ¶ӯөдұл. Т»ЦЦіЭВЦОеёЛ»ъ№№өДјЩЦ«ПҘ№ШҪЪ[P]. ЙВОчКЎ: CN103976807B, 2016-03-02.
[19]ёрОДҪЬ, ХФ¶«Аҙ, ХЕЦш, ЛХУА·ј. Т»ЦЦЧФ¶ҜЙмЛхКҪЖыіөХЪСфЙЎ[P]. ЙВОчКЎ: CN103978876B, 2016-03-02.
[20]ёрОДҪЬ, іВиӨЗп, ОвМмәҪ. Т»ЦЦБҙМхөДКХ·ЕПөНі[P]. ЙВОчКЎ: CN103671795B, 2016-03-02.
[21]ёрОДҪЬ, ЛпФ°ПІ, ЦЈјС, ¶ӯөдұл, ХФ¶«Аҙ. Т»ЦЦЧгөЧКЬБҰІвБҝЧ°ЦГ[P]. ЙВОчКЎ: CN104068870B, 2016-03-02.
[22]ёрОДҪЬ, МёР§Бъ, ГППйСЮ, ҝЬцО, РмЙэ. Т»ЦЦ»щУЪТәС№Зэ¶ҜөД»ъЖчИЛөҜМш»ъ№№[P]. ЙВОчКЎ: CN103287522B, 2016-02-17.
[23]ёрОДҪЬ, ХФ¶«Аҙ, Цм·ж, БхІ©, ЛХУА·ј, ЦмФӘҙә. Т»ЦЦН№ВЦКҪёәС№ОьёҪөДЕАұЪ»ъЖчИЛ[P]. ЙВОчКЎ: CN103129639B, 2016-01-20.
[24]ёрОДҪЬ, іВиӨЗп, ОвМмәҪ. Т»ЦЦЖыіөұщѩ·ГжЧФ¶Ҝ·А»¬Ч°ЦГ[P]. ЙВОчКЎ: CN103660815B, 2016-01-20.
[25]ёрОДҪЬ, БхІ©, іВҝЎУо, ВнАЩ, ХЕ»Ф. Т»ЦЦ¶а№ҰДЬФцБҰЖЖІрЧ°ЦГ[P]. ЙВОчКЎ: CN102814013B, 2015-06-17.
[26]ёрОДҪЬ, әъҝЎЙҪ, ә«звйӘ, СоТжјО, ВіИҪ. Т»ЦЦЧФККУҰЗеПҙЧ°ЦГ[P]. ЙВОчКЎ: CN103495584B, 2015-06-17.
[27]ёрОДҪЬ, РмЙэ, МёР§Бъ, »рНіБъ, БхРЎУВ, Бх№в»Ә. Т»ЦЦұдІХҙшКҪҙтАҰ»ъ[P]. ЙВОчКЎ: CN102934570B, 2014-09-03.
[28]ёрОДҪЬ, Н¬РВРЗ, БхРЎУВ, »рНіБъ, ХФмҝ, РмЙэ, МёР§Бъ, ИОжГжГ. Т»ЦЦҪҘҪшКҪКчЖӨҪХёСС№Лх»ъ[P]. ЙВОчКЎ: CN102934568B, 2014-08-20.
[29]ёрОДҪЬ, ЛпФ°ПІ, РмЙъ, МёР§Бъ. Т»ЦЦҫнС№КҪҪХёС№М»ҜіЙРН»ъ[P]. ЙВОчКЎ: CN102934569B, 2014-08-20.
[30]ёрОДҪЬ, Н¬РВРЗ, ЦмФӘҙә, БхРЎУВ, ИОжГжГ, Бх№в»Ә. Т»ЦЦІЭЖәКчТ¶јсК°С№ЛхЧ°ЦГ[P]. ЙВОчКЎ: CN103202183B, 2014-07-09.
[31]ёрОДҪЬ, ЛпФ°ПІ, ¶ӯөдұл, №щҝӯ, АоУВХю, ёКҪЎЗа, °аҪхЗҝ. Т»ЦЦ№ыКЯЗРЛҝ»ъ[P]. ЙВОчКЎ: CN102717401B, 2014-06-11.
[32]ёрОДҪЬ, Со—¶Фҙ, ЦЬөП, УЪәӯ, УЪОДБъ, Со·«, ХЕЙЩІ©. Т»ЦЦҫщФИЦъЗРө¶јЬ[P]. ЙВОчКЎ: CN102658566B, 2014-04-02.
[33]ёрОДҪЬ, ВЮОД, Ао»Ыҫк, НфСЗФЛ, НхұщРс, №щСо, ХЕСо. Т»ЦЦУГУЪТВ№сөДҙжИЎҝгЧУЧ°ЦГ[P]. ЙВОчКЎ: CN102824032B, 2014-04-02.
[34]ёрОДҪЬ, №щСо, НхұщРс, ХЕСо, Ао»Ыҫк, НфСЗФЛ, ВЮОД. Т»ЦЦУГУЪТВ№сөДҝЙійАӯЙмХ№№ТТВЧ°ЦГ[P]. ЙВОчКЎ: CN102835830B, 2014-04-02.
[35]ёрОДҪЬ, ЛпФ°ПІ, ¶ӯөдұл, АоУВХю, ЦЈјС. Т»ЦЦДЪұЪЗеПҙЖч[P]. ЙВОчКЎ: CN102698993B, 2014-03-12.
[36]ёрОДҪЬ, ВнПюС©, АоСТ, ХФмҝ, НхЕф, НтИ», ХЕФцИЁ. Т»ЦЦ·ВҙьКуМшФҫ»ъЖчИЛөДЧФККУҰұдРОҪЕ[P]. ЙВОчКЎ: CN102700648B, 2013-11-27.
[37]ёрОДҪЬ, АоКчҫь, ХЕ»Ф, іВЧчДЈ, ёЯҪЁ, ВнПюС©. ¶а№ҰДЬБ¬ёЛ¶ҜБҰС§КөСйЖҪМЁ[P]. ЙВОчКЎ: CN102359875B, 2013-08-14.
[38]ёрОДҪЬ, ІЬРЎұҰ, СоЗаБъ, ЛпАцҫь, ЬЗЕфББ, әъЛЙМО. Т»ЦЦј¶ҪшКҪФцБҰЗҜ[P]. ЙВОчКЎ: CN102430796B, 2013-07-17.
[39]ёрОДҪЬ, НхЦЫ, ХЕБЦ, ІЬРЎұҰ, әъУсБъ, ЛпАцҫь, ОДС§. ЧФРРЧЯКҪОўРНөШПВ№ЬөАҫтҪш»ъ[P]. ЙВОчКЎ: CN102162362B, 2013-04-24.
[40]ёрОДҪЬ, ХЕГъ, іВПюәм, Со·Ҫ, °ШБъ. БҪЧФУЙ¶И·ВЙъөҜМш»ъЖчИЛ[P]. ЙВОчКЎ: CN102050156B, 2013-04-03.
[41]ёрОДҪЬ, °ШБъ, іВПюәм, ХЕУАәм, Іс»Ф. өҜМш»ъЖчИЛөДДЬБҝҙжҙўУлКН·ЕЧ°ЦГ[P]. ЙВОчКЎ: CN102050157B, 2013-04-03.
[42]ёрОДҪЬ, НхАцЖҪ, СоҝӘЖҪ, ВнПюС©, іМҫІ. Т»ЦЦ»ЎіЭЧ¶іЭВЦЙијЖ·Ҫ·Ё[P]. ЙВОчКЎ: CN101865272B, 2013-02-20.
[43]ёрОДҪЬ, НхЦЫ, ХЕБЦ, ІЬРЎұҰ, әъУсБъ, ЛпАцҫь, ОДС§. ҝЙөчКҪОўРНөШПВ№ЬөАҫтҪшө¶Н·[P]. ЙВОчКЎ: CN102162363B, 2013-01-16.
[44]ёрОДҪЬ, Оә¶ШОД, Іс»Ф, ·®ЦШЗм, іВЕуНю, ёЯҪЁ. Т»ЦЦЧФЦчёҙО»ВЦНИКҪөҜМшёҙәПТЖ¶Ҝ»ъЖчИЛ[P]. ЙВОчКЎ: CN102009705B, 2012-11-28.
[45]ёрОДҪЬ, Оә¶ШОД, ёЯҪЁ, іВПюәм, іМҫІ, БхТаСу. МшФҫ¶ИҝЙөчөД·ВЙъөҜМш»ъ№№[P]. ЙВОчКЎ: CN102267502B, 2012-11-28.
[46]ёрОДҪЬ, °ШБъ, іВПюәм, Со·Ҫ, ХЕГъ. ·З¶ФіЖіЭВЦБщёЛ·ВЙъөҜМш»ъ№№[P]. ЙВОчКЎ: CN101941476B, 2012-10-10.
[47]Іс»Ф, ёрОДҪЬ, Оә¶ШОД, ОвҪрПг, ·®ЦШЗм, іВЕфНю. Т»ЦЦ»ъЖчИЛ·ВЙъЦъМшЧ°ЦГ[P]. ЙВОчКЎ: CN101862542B, 2012-07-04.
[48]ёрОДҪЬ, НхЦЫ, ХЕБЦ, ІЬРЎұҰ, әъУсБъ, ЛпАцҫь, ОДС§. ҝЙөчКҪЧФККУҰ№ЬөАДЪРРЧЯ»ъ№№[P]. ЙВОчКЎ: CN102128335B, 2012-06-06.
[49]ёрОДҪЬ, ОДС§, ВҪәмСЗ, ХЕАЦ, ОәІ©·Й, ХЕәгСф, БхБъЦй. Т»ЦЦЧйәПКҪ¶а№ҰДЬҫИФ®№ӨҫЯ[P]. ЙВОчКЎ: CN101905846B, 2012-05-30.
[50]ёрОДҪЬ, Іс»Ф, Со·Ҫ, БхТаСу, Оә¶ШОД, іВПюәм. ҙўДЬҝЙөчөДіЭВЦ-ОеёЛ·ВЙъөҜМш»ъ№№[P]. ЙВОчКЎ: CN101941477B, 2012-05-23.
[51]ёрОДҪЬ, ЛОөӨБъ, НхУўО°, ХЕБЦ, ПтУВ. ҝЙҝШУАҙЕКҪОРБчМУЙъЧ°ЦГ[P]. ЙВОчКЎ: CN101961531B, 2012-05-16.
[52]ёрОДҪЬ, НхЦЫ, БхҪЁЖҪ. ҫИЙъ·АөБНш[P]. ЙВОчКЎ: CN101956516B, 2012-02-15.
[53]ёрОДҪЬ, БхәЈМО, АоСо, РмЦҫјС, ХФПІ·ж, Нх»Ы. Т»ЦЦЛ®ГжёЎЙъЦІОпҙтАМЧ°ЦГ[P]. ЙВОчКЎ: CN101725139B, 2011-11-16.
[54]ёрОДҪЬ, РмЦҫјС, ЦЬАЧ, ЛжТшБл, РмҪЎ, ЦЬЮИі¬. Т»ЦЦЕАұЪ»ъЖчИЛөДФЛ¶ҜОьёҪЧ°ЦГ[P]. ЙВОчКЎ: CN101804639B, 2011-07-20.
[55]ёрОДҪЬ, Лпәгі¬, ЛХИфұу, ГП·Іҫь, ВЮәЖ. Т»ЦЦҝЙ»ШКХІјёжЦҪөДІјёжАё[P]. ЙВОчКЎ: CN101533590B, 2011-01-05.
[56]ёрОДҪЬ, ЙтЖҪ, ХЕОДМО, ҪӯВь. ·ВҙьКуНИРОМшФҫ»ъЖчИЛҪб№№[P]. ЙВОчКЎ: CN101244729B, 2010-06-09.
[57]ХЕОДМО, АоҪЁ»Ә, ёрОДҪЬ, ҪӯВь, ЙтЖҪ. МшФҫ»ъЖчИЛ¶ҜБҰПөНі[P]. ЙВОчКЎ: CN101244730B, 2010-06-09.
[58]ёрОДҪЬ, ЛпНт, ХФјУЗе, ХЕЗЕ, УҰёЯГч, БхРсәЈ. ЧФЦъҪшІН»ъ[P]. ЙВОчКЎ: CN100560041C, 2009-11-18.
ВЫОДЧЁЦшЈә
·ўұнҝЖСРј°ҪМС§ВЫОД100УаЖӘЈ¬ұаЦш»ъРөФӯАнҪМІД10УаІҝЎЈ
іц°жЧЁЦшЈә 
1ЎўЎ¶»ъРөФӯАнЧчТөјҜЈЁөЪ1°жЈ©Ў· ёЯөИҪМУэіц°жЙз 1996
2ЎўЎ¶»ъРөФӯАнЧчТөјҜЈЁөЪ2°жЈ©Ў· ёЯөИҪМУэіц°жЙз 2001
3ЎўЎ¶»ъРөФӯАніЈјыМвРНҪвОцј°ДЈДвМвЎ· Очұұ№ӨТөҙуС§іц°жЙз 2003
4ЎўЎ¶»ъРөФӯАнЧчТөјҜЎ· ёЯөИҪМУэіц°жЙз 2004
5ЎўЎ¶»ъРөФӯАнЈЁөЪЖЯ°жЈ©Ў· ёЯөИҪМУэіц°жЙз 2006
6ЎўЎ¶»ъРөФӯАнөзЧУҪМ°ёЎ· ёЯөИҪМУэіц°жЙз
7ЎўЎ¶»ъРөФӯАнНшВзҝОіМЎ· ёЯөИҪМУэіц°жЙз
8ЎўЎ¶»ъРөФӯАнҪвМвЦёДПЎ·
·ўұнЖЪҝҜВЫОДЈә
[1]ёрОДҪЬ, ЦмйӘйӘ, ¶ЎКАҙП, ХЕіЫ, НхіЙГс, ҪҜУС. »щУЪЎ°ЦёҪЪЎұЗэ¶ҜёХИбсоәПКҪұдНд¶И»ъТнәуФөҪб№№өДЙијЖ·Ҫ·Ё[J]. әҪҝХҝЖС§јјКх, 2024, 35 (05): 82-92.
[2]КҜРАН©, СоУо, ёрОДҪЬ, НхЦҫёХ, ЛпПАЙъ. »щУЪ¶аҪЪЧӘ¶Ҝ»ъ№№өДұдНд¶И»ъТнәуФөҪб№№ЙијЖ[J]. Очұұ№ӨТөҙуѧѧұЁ, 2023, 41 (05): 942-949.
[3]ХЕУАәм, МЖЛ«И«, Нхнө, НхіЙГс, ёрОДҪЬ. Т»ЦЦККУГУЪұдНд¶И»ъТнәуФөөДГЙЖӨЙијЖ·Ҫ·Ё[J]. Очұұ№ӨТөҙуѧѧұЁ, 2023, 41 (02): 329-337.
[4]ДӘРЎҫк, ёрОДҪЬ, ИОТЭ·Й, ХФ¶«Аҙ, Оә¶ШОД. »щУЪЖрМшОИ¶ЁРФөД·В»Иіж°ЛёЛМшФҫ»ъЖчИЛЙијЖ[J]. »ъРө№ӨіМС§ұЁ, 2023, 59 (05): 41-52.
[5]ёрОДҪЬ, ХЕУАәм, БхІ©, ХЕЧУ°ә, АоУсЦщ. »щУЪі¬өҜРФІДБПНШЖЛУЕ»Ҝ·Ҫ·ЁөДұдРОТнҪб№№ЙијЖ[J]. әҪҝХҝЖС§јјКх, 2022, 33 (12): 70-80.
[6]Оә¶ШОД, ёЯМО, ХЕПиУо, ёрОДҪЬ, Енұ¶. ¶а№№М¬·ВЙъөҜРФЗэ¶ҜЖчҪб№№ЙијЖј°РФДЬСРҫҝ[J]. »ъРө№ӨіМС§ұЁ, 2022, 58 (13): 71-80.
[7]ёрОДҪЬ. Ў°Л«Т»БчЎұҪЁЙиұіҫ°ПВөДёЯөИ№ӨіМҪМУэЦШЛЬУлҝОіМҪМС§Йо¶ИёДёп[J]. ЦР№ъҙуС§ҪМС§, 2021, (09): 53-61.
[8]ДӘРЎҫк, ёрОДҪЬ, ХФ¶«Аҙ, Оә¶ШОД. ОўРЎРНМшФҫ»ъЖчИЛСРҫҝПЦЧҙЧЫКц[J]. »ъРө№ӨіМС§ұЁ, 2019, 55 (15): 109-123.
[9]ҝЬцО, ёрОДҪЬ. »щУЪ¶аөгЗэ¶ҜКҪИбРФ»ъ№№өДұдРОТнәуФөНШЖЛУЕ»Ҝ[J]. »ъРөЗҝ¶И, 2018, 40 (04): 983-986.
[10]ёрОДҪЬ. АОјЗК№Гь ҙҙҪЁРВКұҙъЎ°Т»БчҝОіМЎұЎӘЎӘ»щУЪ»ъРөФӯАнҝОіМөДёДёпУлҪЁЙиКөјщ[J]. Очұұ№ӨТөҙуѧѧұЁ(Йз»бҝЖС§°ж), 2018, (01): 40-44.
[11]ГППйСЮ, ёрОДҪЬ. З·Зэ¶ҜөҜМш»ъЖчИЛЧоУЕФЛ¶ҜЧЛМ¬өДЗэ¶ҜЖчЕдЦГ[J]. ЦР№ъ»ъРө№ӨіМ, 2017, 28 (15): 1765-1770.
[12]Оә¶ШОД, ёрОДҪЬ, ёЯМО. ·ВЙъБйёРПВөДөҜРФЗэ¶ҜЖчөДСРҫҝЧЫКц[J]. »ъЖчИЛ, 2017, 39 (04): 541-550.
[13]ХЕУАәм, ЙЈСф, ёрОДҪЬ, РмАЪ. ¶аПаІДБПөДИбРФ»ъ№№НШЖЛУЕ»ҜЙијЖ[J]. »ъРөҝЖС§УлјјКх, 2017, 36 (09): 1320-1326.
[14]ГППйСЮ, ёрОДҪЬ, МёР§Бъ. ҝјВЗЗэ¶ҜЖчМШРФөДИбРФөҜМш»ъЖчИЛөД№мјЈёъЧЩҝШЦЖ[J]. »ъРөҝЖС§УлјјКх, 2017, 36 (02): 165-171.
[15]БхТаСу, ТҰСЗ·е, ЛОәЈМО, ёрОДҪЬ. ЗіОц»щУЪҝЙұдҙ«¶ҜұИіЭВЦ-ОеёЛ»ъ№№өДМшФҫ»ъ№№өДМШРФ[J]. »ъРөЙијЖ, 2015, 32 (08): 41-45.
[16]МёР§Бъ, ¶ӯәЈҫь, ёрОДҪЬ, РмЙэ. ИэёХМеТәС№З·Зэ¶ҜМшФҫ»ъЖчИЛСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2014, 33 (12): 1791-1794.
[17]ИОжГжГ, ёрОДҪЬ, ¶ӯәЈҫь, ВнПюС©. ҝјВЗНШЖЛИбРФҪЕЦәөД·ВҙьКу»ъЖчИЛЧЕөШМШРФ·ЦОц[J]. »ъРөЙијЖ, 2014, 31 (11): 20-24.
[18]Оә¶ШОД, ёрОДҪЬ, ХФ¶«Аҙ, ХЕОДАЪ, БхІ©. »щУЪLabWindows/CVIөДИбРФЗэ¶ҜЖчИнјюПөНіКөПЦ[J]. »ъөз№ӨіМ, 2014, 31 (08): 991-996.
[19]Оә¶ШОД, ёрОДҪЬ. МшФҫ»ъЖчИЛСРҫҝПЦЧҙәНЗчКЖ[J]. »ъЖчИЛ, 2014, 36 (04): 503-512.
[20]ёрОДҪЬ, ЙРМО. јјКхЧӘТЖКУҪЗПВҫьГсИЪәПЖуТөіЙіӨСРҫҝ[J]. ҫӯјГСРҫҝөјҝҜ, 2014, (18): 12-14.
[21]»рНіБъ, ёрОДҪЬ, ХФмҝ. јхЛЩЖчПдМеөДИИ-Ҫб№№соәП·ЦОц[J]. »ъРөҙ«¶Ҝ, 2014, 38 (04): 133-136.
[22]РмЙэ, ёрОДҪЬ, ХЕ»Ф. Л«НтПтҪЪПөНіІ»өИЛЩРФТтЛШСРҫҝ[J]. »ъРөҙ«¶Ҝ, 2014, 38 (04): 36-39+52.
[23]БхРЎУВ, ёрОДҪЬ, ХЕУАәм, ХЕ»Ф. Л«НтПтҪЪПөНіЦбХсөДДЈМ¬·ЦОц[J]. »ъРөҙ«¶Ҝ, 2014, 38 (01): 119-121+124.
[24]НхЕф, ¶ӯәЈҫь, ёрОДҪЬ, НтИ». »щУЪАаКчРОҪб№№ФШәЙВ·ҫ¶өДИбРФ»ъТнЗ°ФөУЕ»ҜЙијЖ[J]. »ъРөҝЖС§УлјјКх, 2013, 32 (07): 987-990.
[25]ёрОДҪЬ. ТФЎ°ЦКБҝәНҙҙРВЎұОӘәЛРД Йо»ҜҝОіМҪМС§ёДёпУлҪЁЙи[J]. ЦР№ъҙуС§ҪМС§, 2013, (07): 36-38.
[26]ХЕФцИЁ, ¶ӯәЈҫь, ёрОДҪЬ, ВнПюС©. З·Зэ¶ҜИэёХМе·ВҙьКуМшФҫ»ъЖчИЛВдөШіе»ч·ЦОц[J]. »ъРөЙијЖ, 2013, 30 (06): 32-37.
[27]ХЕУАәм, ёрОДҪЬ, ҝЬцО, БхРЎУВ. Т»ЦЦФШәЙВ·ҫ¶ҝЙҝШөДИбРФ»ъТнЗ°ФөНШЖЛУЕ»Ҝ·Ҫ·Ё[J]. Очұұ№ӨТөҙуѧѧұЁ, 2013, 31 (03): 355-361.
[28]Н¬РВРЗ, ёрОДҪЬ, БхРЎУВ, »рНіБъ. Т»ЦЦҪҘҪшКҪ·ҪАҰС№Лх»ъөДЙијЖУлСРҫҝ[J]. »ъРөЙијЖУлЦЖФм, 2013, (05): 52-55+59.
[29]ХФмҝ, ВнПюС©, Дю·ҪБў, ёрОДҪЬ. ҪҘҝӘПЯФІЦщіЭВЦҙ«¶ҜІОКэ»ҜЙијЖПөНіөДСРҫҝУлҝӘ·ў[J]. »ъРөЦЖФм, 2013, 51 (03): 10-12.
[30]АоСТ, ёрОДҪЬ, ҝЬцО. ·ВҙьКу»ъЖчИЛ·ЦІјКҪИбРФҪЕөДЙијЖУлСРҫҝ[J]. »ъРөЙијЖ, 2013, 30 (02): 18-24.
[31]ёЯҪЁ, ёрОДҪЬ. өҘ№ШҪЪМшФҫ»ъЖчИЛДЈәэЧФККУҰ№мјЈёъЧЩҝШЦЖ[J]. јЖЛг»ъ·ВХж, 2013, 30 (02): 331-335.
[32]іВЕуНю, ёрОДҪЬ, ¶ӯәЈҫь. ҝјВЗИбРФ№ШҪЪөД·ВҙьКуМшФҫ»ъЖчИЛВдөШОИ¶ЁРФСРҫҝ[J]. »ъРөЙијЖ, 2013, 30 (01): 35-39.
[33]іМҫІ, ёрОДҪЬ, Оә¶ШОД, ёЯҪЁ. ·ВҙьКуМшФҫ»ъЖчИЛұдҪШГжЗъПЯИбРФҪЕЧЕөШМШРФСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2012, 31 (12): 1898-1903.
[34]Іс»Ф, ёрОДҪЬ, Со·Ҫ, Оә¶ШОД. ұХБҙКҪөҜМш»ъЖчИЛЖрМшҪЧ¶О¶ҜБҰС§·ЦОц[J]. »ӘЦРҝЖјјҙуѧѧұЁ(ЧФИ»ҝЖС§°ж), 2012, 40 (11): 17-21.
[35]ХЕ»Ф, ёрОДҪЬ, Дю·ҪБў, ХФмҝ. ә¬ФЛ¶ҜёұјдП¶өДЛ«НтПтҪЪПөНі¶ҜБҰС§СРҫҝ[J]. »ъРөҙ«¶Ҝ, 2012, 36 (11): 44-47.
[36]ВнПюС©, ёрОДҪЬ, ХФмҝ, НхАцЖҪ. ЗъПЯҪЕәНОІ°Н¶Ф·ВҙьКуМшФҫ»ъЖчИЛЧЕөШОИ¶ЁРФУ°ПмСРҫҝ[J]. »ъРөЦЖФм, 2012, 50 (08): 11-13.
[37]ХФмҝ, ёрОДҪЬ. ABAQUS/PythonФЪРұіЭВЦ¶ҜМ¬ДцәП·ЦОцЦРөДУҰУГСРҫҝ[J]. »ъөзТ»Ме»Ҝ, 2012, 18 (07): 29-33.
[38]Іс»Ф, ёрОДҪЬ, Оә¶ШОД, ёЯҪЁ. Т»ЦЦјдРӘКҪөҜМш»ъЖчИЛөД»ъ№№ЙијЖУлМшФҫРФДЬ·ЦОц[J]. »ъРө№ӨіМС§ұЁ, 2012, 48 (13): 19-26.
[39]іВЕуНю, ёрОДҪЬ, АоСТ. З·Зэ¶Ҝ·ВҙьКуМшФҫ»ъЖчИЛ¶ҜБҰС§соәПСРҫҝ[J]. »ъРөЙијЖУлЦЖФм, 2012, (05): 159-161.
[40]·®ЦШЗм, ¶ӯәЈҫь, ёрОДҪЬ, іВЕуНю. Тә¶Ҝ·ВҙьКуөҜМш»ъЖчИЛөҘНИ¶ҜБҰС§·ЦОцј°·ВХж[J]. »ъРөЙијЖУлЦЖФм, 2012, (05): 177-179.
[41]АоСТ, ёрОДҪЬ, ·®ЦШЗм. »щУЪЧФККУҰҪб№№өД·ВҙьКу»ъЖчИЛҪЕІҝСРҫҝј°ЙијЖ[J]. »ъРөЙијЖУлЦЖФм, 2012, (05): 187-189.
[42]°ШБъ, ёрОДҪЬ, іВПюәм, ҝЬцО. РЗГжМҪІв·ВЙъјдРӘКҪМшФҫ»ъЖчИЛЙијЖј°КөПЦ[J]. »ъЖчИЛ, 2012, 34 (01): 32-37+43.
[43]іВПюәм, ¶ӯәЈҫь, ёрОДҪЬ, °ШБъ. К®ЧЦЦбНтПтҪЪҙ®БӘЦбПөЦ§іЕ·ҙБҰ·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2011, 30 (12): 2067-2072.
[44]ёЯАыПј, ¶ӯәЈҫь, ёрОДҪЬ, БхТаСу. ҝјВЗИбРФҪЕЦәөД·ВҙьКуМшФҫ»ъЖчИЛВдөШіе»ч·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2011, 30 (10): 1688-1692.
[45]ҪӘРЛіӨ, Со·Ҫ, ёрОДҪЬ, СоҫІ. ҝјВЗОІ°НөДБщёХМе·ВҙьКуМшФҫ»ъЖчИЛөДВдөШОИ¶ЁРФСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2011, 30 (10): 1753-1756+1760.
[46]іВПюәм, ¶ӯәЈҫь, ёрОДҪЬ, °ШБъ. К®ЧЦЦбНтПтҪЪҙ®БӘЦбПөЕӨЧӘ¶ҜБҰС§·ЦОц[J]. »ъРөҙ«¶Ҝ, 2011, 35 (08): 63-67.
[47]НхАцЖҪ, ёрОДҪЬ, СоҝӘЖҪ. әҪҝХ»ЎіЭЧ¶іЭВЦҙ«¶ҜҝЙҝҝРФУЕ»ҜПөНіСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2011, 30 (07): 1191-1195.
[48]іВҪЁі¬, ХЕУАәм, ёрОДҪЬ, ҫ°Юј. »щУЪ¶аІДБПЧйәПөДИбРФ»ъТнЗ°ФөНШЖЛУЕ»Ҝ[J]. »ъРөЙијЖ, 2011, 28 (06): 61-66.
[49]Овұу, ёрОДҪЬ. ҫЯУРІ»Н¬ё№°еҝЧөД»ЎіЭЧ¶іЭВЦДЈМ¬·ЦОц[J]. »ъРөЦЖФм, 2011, 49 (06): 49-52.
[50]Овұу, ёрОДҪЬ. »щУЪІОКэ»ҜөДРұіЭВЦёұҪУҙҘУҰБҰ·ЦОц[J]. »ъРөУлөзЧУ, 2011, (05): 22-25.
[51]БхТаСу, ёрОДҪЬ, Со·Ҫ, ёЯАыПј. »щУЪҝЙұдҙ«¶ҜұИіЭВЦ-ОеёЛ»ъ№№өД·ВҙьКуМшФҫ»ъЖчИЛМШРФСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2011, 30 (05): 722-726.
[52]ҝЬцО, ёрОДҪЬ, ХЕУАәм. ¶аөгРӯөчұдРОИбРФОўјРіЦ»ъ№№ј°ЖдЦ§іЕЧЫәПНШЖЛУЕ»Ҝ[J]. »ъРөҝЖС§УлјјКх, 2011, 30 (05): 751-755.
[53]ВЮ»Ф, АоКчҫь, ёрОДҪЬ, іВЧчДЈ. ёЯЛЩН№ВЦ¶ҜМ¬РФДЬІвКФЧ°ЦГСРҫҝ[J]. »ъРөЙијЖ, 2011, 28 (04): 46-49.
[54]АоҫьЕф, НхәНЖҪ, ёрОДҪЬ. ·ЙТнІјҫЦөНЛЩ·ҙНдТнРНОИҪЎУЕ»ҜЙијЖ[J]. ·ЙРРБҰС§, 2011, 29 (01): 17-20.
[55]БъУАіЙ, ёрОДҪЬ, ХЕУАәм, ҫ°Юј. НвН№ФІ»ЎИбРФҪВБҙөДјЖЛгУл·ЦОц[J]. »ъРөЙијЖ, 2011, 28 (01): 70-72.
[56]ҫ°Юј, ХЕУАәм, ёрОДҪЬ, БъУАіЙ. »щУЪФШәЙВ·ҫ¶·ЁөДИбРФ»ъТнЗ°ФөНШЖЛУЕ»Ҝ[J]. »ъРөЙијЖ, 2011, 28 (01): 85-89.
[57]РмЦҫјС, ёрОДҪЬ, АоФӯ. »щУЪ·ҙТЖ¶ҜН№ВЦөДЕАұЪ»ъЖчИЛФЛ¶ҜОьёҪ·Ҫ°ё[J]. »ъРөЙијЖ, 2010, 27 (11): 31-37.
[58]ҫ°Юј, ХЕУАәм, ёрОДҪЬ, БъУАіЙ. »щУЪ¶аДҝұкФШәЙВ·ҫ¶·ЁөДРОЧҙұдРО»ъТнәуФөИбРФ»ъ№№НШЖЛУЕ»Ҝ[J]. »ъРөҝЖС§УлјјКх, 2010, 29 (10): 1420-1425.
[59]іВҪЈ, ёрОДҪЬ, НхҫьЗҝ, ХЕЛЙ·Й. ЖҪГжЛДёЛ»ъ№№ІОКэ»ҜЙијЖј°ФЛ¶Ҝ·ВХжСРҫҝУлКөПЦ[J]. ЦР№ъЦЖФмТөРЕПў»Ҝ, 2010, 39 (09): 23-26+30.
[60]»ЖҪЬ, ёрОДҪЬ. ЧФККУҰ»ъТнөД·ўХ№ПЦЧҙј°Жд№ШјьјјКхСРҫҝ[J]. әҪҝХұшЖч, 2010, (02): 8-12.
[61]ёрОДҪЬ, ЦмЕфёХ, БхКААц, ХЕУАәм. »щУЪИбРФ»ъ№№өД»ъТнЗ°ФөұдРО¶аДҝұкУЕ»Ҝ[J]. Очұұ№ӨТөҙуѧѧұЁ, 2010, 28 (02): 211-217.
[62]ЕЛ·ж, ¶ӯәЈҫь, ёрОДҪЬ. ј«¶Л»·ҫіПВРіІЁіЭВЦҙ«¶ҜөДІаП¶·ЦОц[J]. »ъРөЙијЖ, 2010, 27 (02): 58-62.
[63]ЦмЕфёХ, ёрОДҪЬ, ХЕУАәм, ХФ·Й. »щУЪSIMPәНGAұдРОИбРФ»ъТнәуФөөДНШЖЛУЕ»Ҝ[J]. »ъРөҝЖС§УлјјКх, 2009, 28 (11): 1468-1472.
[64]ХЕГъ, ёрОДҪЬ, °ШБъ, іВПюәм. РЗГжМҪІв·ВЙъөҜМш»ъЖчИЛЙијЖЎў·ВХжј°КөСй[J]. »ъЖчИЛ, 2009, 31 (06): 481-486.
[65]Іс»Ф, АоҪЁ»Ә, ёрОДҪЬ. »щУЪҝЙөчіЭВЦЎӘОеёЛ»ъ№№өД·ВҙьКуМшФҫ»ъЖчИЛФЛ¶ҜІҪМ¬·ЦОц[J]. »ъЖчИЛ, 2009, 31 (06): 487-492.
[66]ёрОДҪЬ. ¶Ф»ъРө»щҙЎҝОіМҪМС§·Ҫ·ЁёДёпөДЛјҝјУлМҪМЦ[J]. ЦР№ъҙуС§ҪМС§, 2009, (10): 4-7.
[67]Іс»Ф, АоҪЁ»Ә, ёрОДҪЬ. Т»ЦЦөҜМш»ъЖчИЛөДФҪХПРФДЬ·ВХж·ЦОц[J]. »ъРөЦЖФм, 2009, 47 (09): 16-17.
[68]НхХсУо, Со·Ҫ, ФАУіХВ, ёрОДҪЬ. »щУЪҫщЦКИбРФёЛДЈРНөД·ВҙьКу»ъЖчИЛИбРФҪЕЧЕөШҪЧ¶ОФЛ¶ҜМШРФСРҫҝ[J]. »ъЖчИЛ, 2009, 31 (05): 460-464.
[69]ХФ·Й, ёрОДҪЬ, ХЕБъ. ДіОЮИЛ»ъИбРФ»ъТнәуФөұдРО»ъ№№өДНШЖЛУЕ»Ҝ[J]. »ъРөЙијЖ, 2009, 26 (08): 19-22.
[70]°ШБъ, ёрОДҪЬ, іВПюәм, ХЕГъ. УГУЪРРРЗМҪІвөДМшФҫ»ъЖчИЛСРҫҝ[J]. »ъЖчИЛ, 2009, 31 (04): 311-319.
[71]ХЕ»Ф, ёрОДҪЬ, Со·Ҫ. ҝјВЗҪЕЦәөД·ВҙьКуМшФҫ»ъЖчИЛВдөШОИ¶ЁРФСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2009, 28 (06): 754-759.
[72]»ЖҪЬ, ёрОДҪЬ. »щУЪұдГЬ¶И·ЁөДРОЧҙұд»ҜИ«ИбРФ»ъ№№ЙијЖј°КөСйСРҫҝ[J]. әҪҝХұшЖч, 2009, (02): 39-42.
[73]АоХЬ, ёрОДҪЬ, НхәНЖҪ. ИбРФұдРО»ъТнәуФөНШЖЛУЕ»ҜЙијЖ[J]. јЖЛг»ъ·ВХж, 2009, 26 (03): 62-65.
[74]ХЕБъ, НхәНЖҪ, ёрОДҪЬ, ХФ·Й. »щУЪИбРФТнАЯөДұдРО»ъТнјёәОІОКэЙијЖ[J]. әҪҝХјЖЛгјјКх, 2009, 39 (01): 1-5.
[75]ёрОДҪЬ, ОД·Е. »щУЪZMP·ЁөД·ВҙьКуМшФҫ»ъЖчИЛЧЕөШҪЧ¶ОФЛ¶ҜОИ¶ЁРФ·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2008, 27 (11): 1338-1342.
[76]ОД·Е, ёрОДҪЬ. »ъЖчИЛФЛ¶ҜОИ¶ЁРФЕРҫЭёЕКц[J]. »ъРөЙијЖУлЦЖФм, 2008, (11): 188-190.
[77]АоХЬ, ёрОДҪЬ, ХФ·Й. НШЖЛУЕ»ҜјјКхФЪ»ъТнЗ°ФөЙијЖЦРөДУҰУГ[J]. »ъРөҝЖС§УлјјКх, 2008, (10): 1158-1162.
[78]БхКААц, ёрОДҪЬ, Аоҝь, ЦмЕфёХ. »щУЪёЛЛч»щҪб№№өДИэО¬ИбРФұдРО»ъТнҪб№№НШЖЛУЕ»ҜЙијЖ[J]. »ъРөҝЖС§УлјјКх, 2008, (10): 1191-1194.
[79]ФАУіХВ, ёрОДҪЬ, °ШБъ. ·ВҙьКуМшФҫ»ъЖчИЛөДёХИб»мәПҪЁДЈФЛ¶ҜІҪМ¬·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2008, (09): 1142-1145.
[80]°ШБъ, ёрОДҪЬ, іВПюәм, ФАУіХВ. ҫЯУР·ЗПЯРФөҜМшБҰөД·ВҙьКу»ъ№№өҜМшРФДЬ·ЦОц[J]. »ъРөЙијЖ, 2008, (08): 43-44+73.
[81]ХЕОДМО, ёрОДҪЬ, АоҪЁ»Ә, ҪӯВь, ЙтЖҪ. Ў°ҙьКуЎұМшФҫ»ъЖчИЛ¶ҜБҰПөНі·Ҫ°ёЙијЖУлСРҫҝ[J]. »ъЖчИЛ, 2008, (04): 359-363.
[82]БхКААц, ёрОДҪЬ, АоКчҫь. КөПЦИбРФ»ъТнәуФөРОЧҙұд»ҜөДЧЫәПУЕ»Ҝ(УўОД)[J]. Chinese Journal of Aeronautics, 2008, (02): 187-192.
[83]іВРг, ёрОДҪЬ, ХЕУАәм, БхКААц. КөПЦёЯФШәЙПВ»ъТнЗ°ФөРОЧҙұд»ҜөДИбРФ»ъ№№УЕ»ҜЙијЖ[J]. »ъРөҝЖС§УлјјКх, 2008, (01): 33-36.
[84]ёрОДҪЬ. Йо»Ҝ»ъРө»щҙЎҝОіМҪМС§ёДёпУлҝОіМҪЁЙиөДЛјҝј[J]. ЦР№ъҙуС§ҪМС§, 2007, (12): 12-14.
[85]ёрОДҪЬ, »ЖҪЬ, Со·Ҫ. ·ВҙьКу»ъЖчИЛМЪҝХҪЧ¶ОМшФҫФЛ¶ҜМШРФСРҫҝ[J]. ЦР№ъ»ъРө№ӨіМ, 2007, (21): 2521-2524.
[86]іВРг, ёрОДҪЬ, ХЕУАәм, БхКААц. »щУЪТЕҙ«Лг·ЁөДИбРФ»ъ№№РОЧҙұд»ҜЧЫәПУЕ»ҜСРҫҝ[J]. әҪҝХС§ұЁ, 2007, (05): 1230-1235.
[87]ёрОДҪЬ, »ЖҪЬ, Со·Ҫ. НШЖЛУЕ»ҜјјКхј°ЖдФЪЖыіөЙијЖЦРөДУҰУГ[J]. »ъҙІУлТәС№, 2007, (08): 11-14+4.
[88]ЕУ»Ә»Ә, ёрОДҪЬ, Со·Ҫ. ҝјВЗОІ°НөД·ВҙьКуМшФҫ»ъЖчИЛФЛ¶ҜМШРФСРҫҝ[J]. »ъҙІУлТәС№, 2007, (08): 1-4.
[89]ёрОДҪЬ, ПДРс·е, »ЖҪЬ, ОД·Е. »щУЪЛ«ЦКБҝ-өҜ»ЙДЈРНөД·ВҙьКу»ъЖчИЛјдРӘМшФҫВдөШОИ¶ЁРФСРҫҝ[J]. Очұұ№ӨТөҙуѧѧұЁ, 2007, (04): 517-522.
[90]ЦЬәЈСа, ёрОДҪЬ. ҝјВЗ№ШҪЪ·ЗПЯРФёХ¶ИөД·ВҙьКуИбРФМшФҫ»ъ№№¶ҜБҰМШРФ·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2007, (08): 1001-1005.
[91]»ЖҪЬ, ёрОДҪЬ, Со·Ҫ. КөПЦ»ъТнЗ°ФөРОЧҙБ¬Ршұд»ҜИбРФ»ъ№№өДНШЖЛУЕ»Ҝ[J]. әҪҝХС§ұЁ, 2007, (04): 988-992.
[92]ХІНы, ёрОДҪЬ. ·ВҙьКуМшФҫ»ъЖчИЛЧЕөШҪЧ¶ОөД¶ҜБҰМШРФСРҫҝ[J]. »ъРөЙијЖ, 2007, (06): 23-25.
[93]ёрОДҪЬ, ЙтФКОД, »ЖҪЬ, АоПтСф. ·ВҙьКу»ъЖчИЛМшФҫ№эіМЦРөДДЬБҝұд»Ҝ·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2007, (06): 677-680.
[94]ПДРс·е, ёрОДҪЬ. ·ВЙъ»ъЖчИЛФЛ¶ҜОИ¶ЁРФөДСРҫҝҪшХ№[J]. »ъҙІУлТәС№, 2007, (02): 229-234.
[95]НхУӯҙә, ёрОДҪЬ. ·ВҙьКуМшФҫ»ъЖчИЛ»ъ№№Дж¶ҜБҰС§·ЦОц[J]. »ъРөЙијЖ, 2006, (11): 19-21.
[96]ПДРс·е, ёрОДҪЬ, ХЕУАәм. »щУЪөҜ»ЙЎӘЦКБҝДЈРНөД·ВҙьКуМшФҫ»ъЖчИЛІҪМ¬ОИ¶ЁРФСРҫҝ[J]. »ъЖчИЛ, 2006, (05): 488-494.
[97]»ЖҪЬ, ёрОДҪЬ. ЖҪГжЛ«ОИМ¬ИбРФ»ъ№№өДЙијЖ[J]. »ъРөЦЖФм, 2006, (09): 35-37.
[98]АоПтСф, ёрОДҪЬ, Со·Ҫ. ҝјВЗҪЕІҝИбРФөД·ВҙьКуМшФҫ»ъЖчИЛФЛ¶ҜМШРФСРҫҝ[J]. »ъЖчИЛ, 2006, (04): 374-378+399.
[99]ёрОДҪЬ, ЙтФКОД, Со·Ҫ. ·ВҙьКу»ъЖчИЛМшФҫФЛ¶ҜІҪМ¬өДФЛ¶ҜС§[J]. »ъРө№ӨіМС§ұЁ, 2006, (05): 22-26.
[100]ёрОДҪЬ, ЙтФКОД, Со·Ҫ. ·ВҙьКуИбРФМшФҫ»ъЖчИЛөДЗэ¶ҜБҰМШРФСРҫҝ[J]. ЦР№ъ»ъРө№ӨіМ, 2006, (08): 857-861.
[101]»ЖФтұш,ёрОДҪЬ,ВнАы¶р. ·ВҙьКуМшФҫ»ъ№№ОұёХМеДЈРНөД¶ҜБҰС§·ЦОц[J]. »ъРөҝЖС§УлјјКх, 2005, (08): 978-980.
[102]ёрОДҪЬ. ТФРВөДҪМС§АнДоҙтФм»ъРөФӯАн№ъјТҫ«Ж·ҝОіМ[J]. ЦР№ъҙуС§ҪМС§, 2005, (07): 10-12.
[103]ВнАы¶р,ёрОДҪЬ,»ЖФтұш. ·ВҙьКуМшФҫ»ъЖчИЛХэФЛ¶ҜС§·ЦОц[J]. »ъРөЙијЖ, 2005, (03): 28-30.
[104]ВнАы¶р,ёрОДҪЬ,»ЖФтұш. НИРН·ВЙъМшФҫ»ъЖчИЛФЛ¶Ҝ»ъАнөДСРҫҝЧЫКц[J]. »ъРөЙијЖУлЦЖФм, 2005, (02): 62-63.
[105]ёрОДҪЬ,ХЕНхИ«. »щУЪPro/EөД»ЎГж·Ц¶ИН№ВЦ»ъ№№ІОКэ»ҜЙијЖУл·ВХж[J]. »ъРөЙијЖ, 2005, (01): 11-14.
[106]ВнАы¶р,ёрОДҪЬ,»ЖФтұш. НИРН·ВЙъМшФҫ»ъЖчИЛФЛ¶Ҝ»ъАнөДСРҫҝ[J]. »ъЖчИЛјјКхУлУҰУГ, 2004, (06): 28-31.
[107]ёрОДҪЬ,ҪӘ°®№ъ,ХЕ№в. іЭВЦЎӘОеёЛ»ъ№№Б¬ёЛЗъПЯРОЧҙөДИ«ІОКэМШРФСРҫҝ[J]. »ъРөЙијЖУлСРҫҝ, 2004, (03): 61-64+8.
[108]ёрОДҪЬ. »ъРө»щҙЎПөБРҝОіМҪМС§ёДёпСРҫҝУлКөјщ[J]. Очұұ№ӨТөҙуѧѧұЁ(Йз»бҝЖС§°ж), 2003, (03): 83-85.
[109]ОвС©ЛЙ,ёрОДҪЬ,Ао»Ф. Ф¶іМРӯН¬ҪМС§ЦРөДНшТіН¬ІҪХ№КҫПөНіКөПЦ[J]. јЖЛг»ъУҰУГСРҫҝ, 2002, (06): 156-157+160.
[110]ёрОДҪЬ,іВЧчДЈ. ЖҪГжБ¬ёЛЗъПЯөД·ЦІј№жВЙј°ЖдЗъПЯ»жЦЖөДТ»ЦЦјтҪЭ·Ҫ·Ё[J]. »ъРөҝЖС§УлјјКх, 1999, (06): 937-939.
[111]ХЕУўҪЬ,°ЧЧчБШ,ХФИкјО,ёрОДҪЬ. ГжПтДжПт№ӨіМөДКөМеЦШ№№·Ҫ·ЁөДСРҫҝ©ӨЎӘМШХчК¶ұрәНИэО¬ЦШ№№[J]. »ъҙІУлТәС№, 1999, (04): 38-39+2.
[112]ёрОДҪЬ,іВЧчДЈ. »щУЪІОКэ»Ҝ»ъ№№¶Ҝ»ӯ·ВХжөДіЭВЦ-Б¬ёЛ»ъ№№№мјЈНјЖЧөДСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 1999, (03): 95-97.
[113]ёрОДҪЬ,ОвБўСФ. ¶аГҪМејјКхЎўјЖЛг»ъНшВзУлҝОіМҪМС§»щөШҪЁЙи[J]. ПЦҙъҪМУэјјКх, 1999, (02): 43-46.
[114]ёрОДҪЬ,іВЧчДЈ. іЭВЦ-ОеёЛ»ъ№№өД№мјЈМШРФСРҫҝ[J]. Очұұ№ӨТөҙуѧѧұЁ, 1997, (04): 56-60.
[115]ВнҪЁІЦЈ¬БЦЖд°ҪЈ¬Ф¬КАЦТЈ¬ёрОДҪЬ. Т»ЦЦөзЧУЙЁГиС№БҰІвБҝПөНі[J]. КэҫЭІЙјҜУлҙҰАн, 1994, (03): 225-228.
[116]ёрОДҪЬ. ЖҪГжБ¬ёЛ»ъ№№өДCADј°¶ҜМ¬ДЈДв[J]. »ъРөҝЖС§УлјјКх, 1994, (03): 127-130.
[117]ВнҪЁІЦЈ¬БЦЖдЈ¬ёрОДҪЬ. »ъРө№КХПХп¶ПС§ҝЖөДПЦЧҙј°·ўХ№[J]. »ъРөҝЖС§УлјјКх, 1994, (02): 85-90.
·ўұн»бТйВЫОДЈә
1 РРРЗМҪІв»ъЖчИЛөДТЖ¶ҜјјКх¶ФұИ·ЦОц ФАУіХВ; ёрОДҪЬ; °ШБъ ЦР№ъУоәҪС§»бЙоҝХМҪІвјјКхЧЁТөОҜФұ»бөЪИэҪмС§Кх»бТй ЦР№ъ»бТй 2006-11
2 ИбРФ»ъ№№өДСРҫҝПЦЧҙј°ЖдФЪ·ВЙъБмУтөДУҰУГЗ°ҫ° »ЖФтұш; ёрОДҪЬ; ВнАы¶р өЪК®ЛДҪмИ«№ъ»ъ№№С§С§КхСРМЦ»бфЯөЪ¶юҪмәЈПҝБҪ°¶»ъ№№С§С§КхҪ»Бч»б ЦР№ъ»бТй 2004-07
 ИЩУюҪұАшЈә ИЩУюҪұАшЈә
1Ўў1998Дк»сҪМУэІҝҝЖјјҪшІҪ¶юөИҪұЈ»
2Ўў1999Дк»сұҰёЦҪМУэ»щҪрУЕРгҪМКҰҪұәН»сЙВОчКЎҪМС§іЙ№ыМШөИҪұЈ»
3Ўў2001Дк»с№ъјТј¶ҪМС§іЙ№ы¶юөИҪұЈ»
4Ўў2002Дкұ»КЪУи№ъ·АҝЖ№ӨОҜОҜКфёЯРЈЎ°УЕРгҪМКҰЎұИЩУюіЖәЕЈ»
5Ўў2003Дкј°2005Дк»сЙВОчКЎҪМС§іЙ№ы¶юөИҪұЈ»И«№ъ»ъРөҙҙРВЙијЖҙуИьТ»өИҪұ1ПоәН¶юөИҪұ2ПоЈЁЦёөјЈ©Ј»
6Ўў2003Дк»сЙВОчКЎЎ°УЕРгҪМКҰЎұИЩУюіЖәЕЈ»
7Ўў2003Дкұ»ЖАОӘЙВОчКЎЎ°ЖХНЁёЯРЈҪМС§ГыКҰЎұЈ»
8Ўў2003ДкёәФрөДЎ°»ъРөФӯАнЎұҝОіМ»сКЧЕъ№ъјТҫ«Ж·ҝОіМЈ»
9Ўў2007Дк»сөЪИэҪмЖХНЁёЯРЈҪМС§ГыКҰҪұЎЈ
 ГҪМеұЁөАТ»Јә ГҪМеұЁөАТ»Јә
ОТРЈЎ°КЧҪмұҫҝЖҪМС§ЧҝФҪіЙҫНҪұЎұ»сөГХЯ
ёрОДҪЬЈә40ДкјбКШҙтФмИ«№ъЎ°ҪрҝОЎұЎ°ҪрҪМІДЎұ
2023-04-15 АҙФҙЈәөіОҜРыҙ«Іҝ
Оч№ӨҙуРВОЕНш4ФВ11ИХөзЈЁОДЧЦ ё¶вщ КУЖө ЛҫХЬ ЙгУ° В¬өПЈ©Лы40ДкИзТ»ИХЈ¬ФЪИэіЯҪІМЁЙоёыПёЧчЈ¬ОӘКэТФНтјЖС§ЧУҝӘЖфБЛ№ӨіМУҰУГөДҙҙРВЦ®ГЕЈ»ЛыЕ»РДБӨСӘЈ¬ҙшБмНЕ¶УРЮ¶©ФЩ°жөДЎ¶»ъРөФӯАнЎ·ЈЁөЪ°Л°жЈ©»сКЧҪмИ«№ъУЕРгҪМІДТ»өИҪұЈ¬430¶аЛщёЯРЈҪ«Ц®ЧчОӘ»ъРөАаПа№ШЧЁТөСЎУГҪМІДЎЈ
ЛыҫНКЗ№ъјТј¶ҪМС§ГыКҰЎўКЧҪмИ«№ъҪМІДҪЁЙиПИҪшёцИЛЎўКЧҪмұҫҝЖҪМС§ЧҝФҪіЙҫНҪұ»сөГХЯЎў»ъөзС§ФәҪМКЪЎӘЎӘёрОДҪЬЎЈ
Ў°°СРДСӘ¶јУГФЪБЛҪІМЁЙПЎұ
1977Дк»ЦёҙёЯҝјөДҫцІЯУМИзТ»өАҙәАЧЈ¬Пмі№ҙуҪӯДПұұТІі№өЧөгИјБЛёрОДҪЬөДЎ°ҙуС§ГОЎұЎЈХэЧчОӘЦӘЗаФЪПзҙеЦРС§өұАПКҰөДЛыЈ¬°ЧМмЙПҝОНнЙПұёҝјЈ¬ИзФёҝјИЎЙВОч»ъРөС§Фә»ъРөЙијЖЦЖФмЧЁТөЈ¬ІўФЪЦРЖЪҪшИлУЙФӯ»ъРө№ӨТөІҝЧйҪЁөД»ъРөФӯАнј°»ъРөБгјюКҰЧК°аҫН¶БЎЈұПТөәуЈ¬ЛыПИұ»·ЦЕдЦБЙтСфЦШРН»ъЖчі§өЈИОЦ°№ӨҙуС§ҪМКҰЈ¬ҙЛКұ№ъјТјұРиЕаСш»ъРөБмУтПа№ШИЛІЕЈ¬№ДАшұПТөЙъГЗјМРшЙоФмЈ¬ТтЙПС§әНИОҪМЖЪјдіӨЖЪК№УГЧЕОчұұ№ӨТөҙуС§Лп»ёҪМКЪЦчұаөДЎ¶»ъРөФӯАнЎ·әНе§Бј№уҪМКйЦчұаөДЎ¶»ъРөБгјюЎ·Ј¬»іЧЕ¶ФҝОіМЎўҪМІДөДгҝгҪЈ¬ЛыДҪГыұЁҝјОчұұ№ӨТөҙуС§Л¶КҝСРҫҝЙъІўИзФёіЙОӘЛп»ёҪМКЪөДөЬЧУЈ¬ЧФҙЛҝӘЖфБЛУлҝОіМЎўҪМІДіӨҙпТ»ЙъөДоҝ°нЎЈ
ёрОДҪЬУлөјКҰј°НЕ¶УҪМКҰХэФЪјҜМеұёҝОЈЁУТИэЈәөјКҰЛп»ёҪМКЪЧуТ»ЈәіВЧчДЈҪМКЪЈ¬ЧуИэЈәёрОДҪЬЈ©
Ў°БфРЈәуЛдУРТ»¶ЁҪМС§ҫӯСйЈ¬ө«ОӘБЛёьЙоИлАнҪвҝОіМЈ¬»№КЗТӘёъЧЕЛпАПКҰЦъҝОЈ¬Н¬КұАыУГҝХУаКұјдТІ№г·әЙоИлөШсцМэіВЧчДЈөИТ»ЕъАПҪМКЪЙПөДЎ¶»ъРөФӯАнЎ·Ў¶»ъРөЙијЖЎ·Ў¶»ъРөЙијЖ»щҙЎЎ·өИЎЈҙУЙПәГТ»МГҝОөҪДЬЙПәГТ»ГЕҝОЈ¬ХыХыУГБЛБҪДкКұјдЎЈЎұНЁ№эіӨЖЪёъҝОЈ¬РҙҝОМГұКјЗЎўұаРҙҪМ°ёЎўФЪҪМСРКТКФҪІЈ¬ёрОДҪЬХЖОХБЛКЪҝОҫӯСйәНјјЗЙЈ¬Н¬КұЧчОӘС§ЙъЈ¬ЛыУЦәЬБЛҪвС§П°ЦРөДА§»уУлДСөгЈ¬ХвОӘЛыИХәуҪМС§ЎўұаРҙҪМІДөм¶ЁБЛФъКөөД»щҙЎЎЈ
ұёҝОКұЈ¬ёрОДҪЬЧЬ»бЦШРВёҙЕМКЪҝОР§№ыЈ¬ёДРҙҝОіММбёЩЈ¬І»¶ПИЪИлС§ҝЖЗ°СШЦӘК¶әНЧоРВҝЖјјіЙ№ыЈ¬ЧјұёЧоДЬТэ·ўЛјҝјРЛИӨөДҪМС§°ёАэЎЈЙПҝОКұЈ¬ЛыЧЬКЗМбЗ°өҪҪМКТЈ¬ј°КұКХјҜС§ЙъөДОКМвЈ¬БЛҪвС§ЙъөДС§ЗйәНҪМС§·ҙАЎЈ¬ТФҙЛБй»оөчХыҪМС§Ҫш¶ИЎЈҝОУаКұјдЈ¬ЛыПИәуҝӘ·ўБЛ4°ж¶аГҪМеөзЧУЛШІДәНҪМ°ёЈ¬ұ»И«№ъН¬АаҝО№г·әК№УГЎЈҙЛНвЈ¬Лы»№МШұрЧўЦШҪ«ЦР№ъУЕРгҙ«НіОД»ҜЎўОЁОпұзЦӨ·ЁөДХЬС§ЛјПлөИИЪИлөҪҝОіМЦРЈ¬УГЎ°ЦёДПіөЎұЎ°ДҫЕЈБчВнЎұөИҪТКҫ»ъРөЧФККУҰҝШЦЖјјКхЈ¬ҙУЎ°ИЛАаОДГчЖрФҙЎұЖф·ўС§ЙъМҪМЦРВКұҙъЎ°ИЛЎў»ъЎў»·ҫі№ІИЪЎұөД·ўХ№АнДоЈ¬ИуОпОЮЙщөШҙ«КЪЦӘК¶ЛјПлЦ®өАЎўЧцИЛЧцКВЦ®өАәНЦР№ъОД»ҜЦ®өАЎЈ
ёрОДҪЬЧчОӘҪМУэІҝКЧЕъ»ъРө»щҙЎҝОіМ№ъјТҪМС§»щөШЎў»ъРөФӯАн№ъјТҫ«Ж·ҝОіМәН»ъРө»щҙЎ№ъјТј¶ҪМС§НЕ¶УёәФрИЛЈ¬ПИәуЦчіЦК®¶аПо№ъјТј¶ҪМёДПоДҝЈ¬ЦчҪІҝОіМТІ»сЖА№ъјТҫ«Ж·ҝОЎўНшВзҪМУэҫ«Ж·ҝОөИКЧЕъ№ъјТј¶ҝОіМИЩУюЎЈҪМС§Л®ЖҪЛдҪ»ҝЪіЖУюЈ¬ө«ЛыМ№СФГҝҙОЙПҝО»№КЗ»бУРР©ҪфХЕЈ¬Ў°ҪІМЁЛдРЎЈ¬ө«ФрИОЦШҙуЎўТвТеЦШҙуЎЈЧчОӘҪМКҰТӘ°СРДСӘУГФЪҪІМЁЙПЈ¬ТӘИ·ұЈЧФјәҪІөДГҝМГҝОЎўГҝҫд»°ЎўГҝёцЦӘК¶өг¶јВдКөөҪЕаСшС§ЙъіЙіӨіЙІЕөДёщұҫДҝұкЙПЎЈЎұ
Ў°ҪрҝОҫНТӘУРҪрҪМІДЎұ
П°ҪьЖҪЧЬКйјЗФЪөіөД¶юК®ҙуұЁёжЦРЦёіцЈ¬Ў°Йо»ҜҪМУэБмУтЧЫәПёДёпЈ¬јУЗҝҪМІДҪЁЙиәН№ЬАнЎЈЎұҪМІДКЗҪМУэҪМС§өД№ШјьТӘЛШЈ¬ёьКЗБўөВКчИЛөД»щұҫФШМеЎЈ
2021Дк10ФВЈ¬И«№ъҪМІД№ӨЧч»бТйфЯКЧҪмИ«№ъҪМІДҪЁЙиҪұұнХГ»бФЪҫ©ХЩҝӘЈ¬Ў¶»ъРөФӯАнЎ·»сИ«№ъУЕРгҪМІДТ»өИҪұЈ¬ёрОДҪЬАПКҰ»сКЧҪмИ«№ъҪМІДҪЁЙиПИҪшёцИЛЎЈЧчОӘ№ъДЪөЪТ»Іҝ»ъРөС§ҝЖЧЁТө»щҙЎҪМІДЈ¬ұҫКйОӘОТ№ъ»ъРөБмУтИЛІЕЕаСшЧціцБЛҫЮҙу№ұПЧЎЈ
Ў¶»ъРөФӯАнЎ·өДөЪТ»°жЦБөЪБщ°ж
Ў°Ў¶»ъРөФӯАнЎ·ҪМІДДэҪбЧЕОч№Өҙу»ъРөФӯАнУл»ъРөБгјюҪМСРКТБҪҙъИЛөДРДСӘЎЈФзФЪ1953ДкЈ¬ОТөДөјКҰЛп»ёҪМКЪҫНФЪОчұұ№ӨС§ФәЈЁОТРЈЗ°ЙнЦ®Т»Ј©ҝӘЙиБЛ№ъДЪөЪТ»ГЕ»ъРөФӯАнҝОіМЈ¬1959ДкУЙёЯөИҪМУэіц°жЙзіц°жБЛөЪТ»°жЎ¶»ъРөФӯАнЎ·Ј¬Іўұ»ҪМУэІҝЖАОӘ»ъРөФӯАнИ«№ъОЁТ»НЁУГҪМІДЎЈБфРЈәуёъЛжөјКҰәНҪМСРКТАПЗ°ұІГЗјМРшұаРҙұҫКйЈ¬30¶аДк№эИҘЈ¬УЦУРәЬ¶аДкЗбИЛјУИлөҪұҫКйөДұаРҙЧйЎЈЛдИ»ҪМІДДЪИЭКјЦХУлКұҫгҪшЈ¬ЧЬУРРВЛјВ·ЎўРВЦӘК¶ЎўРВ°ёАэЎўРВ·Ҫ·ЁЈ¬ө«КЗөЪТ»ЦчұаЛп»ёөДҪМІДКрГыұЈБфІ»ұдЎЈОТГЗПЈНыНЁ№эХвЦЦ·ҪКҪЈ¬јМРшҙ«іРАПЦРЗаЎ®ҙ«°пҙшЎҜөДУЕБјҙ«НіЈ¬ТІҙ«өЭЎ®ҙ«іРЎў·оПЧЎўҙҙРВЎўТэБмЎҜөДҝОіМЎўҪМІДҪЁЙиАнДоЎЈЎұёрОДҪЬ¶ҜЗйөШЛөЎЈ
»ъРөФӯАнөДөЪЖЯ°жЦБөЪҫЕ°ж·вГж
Ў°ДЪИЭРВЎў·Ҫ·ЁКөЎўУРТэБмРФЎұКЗЎ°УГ»§ЎұГЗЧЬҪбЎ¶»ъРөФӯАнЎ·өДИэёцМШөгЎЈЎ¶»ъРөФӯАнЎ·өЪБщ°жФЪ№ъДЪН¬АаҪМІДЧоПИТэИлЎ°№ӨТө»ъЖчИЛ»ъ№№ј°ЖдЙијЖЎұЈ¬өЪЖЯ°жТэИлЎ°»ъ№№Ҫб№№өДРНЧЫәПј°әПАнЙијЖЎұЈ¬өЪ°Л°жТэИлЎ°ГжПт¶аС§ҝЖҪ»ІжИзТҪ№ӨҪбәПөИҙҙРВКөАэЎұЈ¬өЪҫЕ°жФтҙҙҪЁБЛҫЯУРЦР№ъОД»ҜЦ®»кәНИЪИлРВ№ӨҝЖұіҫ°ПВіЙ№ыөјПтҪМУэАнДоөДРВҪМІДМеПөЈ¬ёьәГВъЧгРВКұҙъ»ъРөБмУтҙҙРВ·ўХ№әНС§ЙъЦХЙнС§П°өДРиТӘЎЈ
Ў°ҪрҝОҫНТӘУРҪрҪМІДЈ¬ЧчОӘЎ¶»ъРөФӯАнЎ·өДЎ®ҙ«іРИЛЎҜЈ¬ОТУРФрИОҪ«АПЗ°ұІөДУЕБјҙ«НіәНУЕРгҝОіМЧКФҙ·ўСп№вҙуЈ¬І»№јёәөјКҰөДЕаСшәНЖЪНыЎЈЎұёрОДҪЬјб¶ЁөШЛөЎЈДҝЗ°Ј¬Ў¶»ъРөФӯАнЎ·І»Ҫцұ»°ьә¬Ў°Л«Т»БчЎұҪЁЙиёЯРЈФЪДЪөД430УаЛщёЯРЈСЎЧцҪМІДЈ¬ТІұ»әҪҝХЎўәЈСуЎўіөБҫөИ№ӨТөҪзПЦЦ°јјКхИЛФұК№УГЈ¬ҙУөЪЖЯ°жТФАҙЈ¬АЫјЖ·ўРРБҝі¬№э120НтІбЎЈ
2022ДкЈ¬ОӘјУЗҝҪМёДРӯН¬Ј¬ККУҰРВРОКЖПВНшВзҪМУэРиЗуЈ¬ёрОДҪЬ»№ЗЈН·ҪЁЙиБЛҪМУэІҝКЧЕъБўПоҪЁЙиөД»ъРөФӯАнј°»ъРөБгјюЈЁЙијЖЈ©РйДвҪМСРКТЈ¬¶Ф№ъДЪН¬АаЧЁТөҪМІДДЛЦБПа№ШС§ҝЖҪЁЙи¶јІъЙъБЛЙоФ¶өШУ°ПмЎЈ
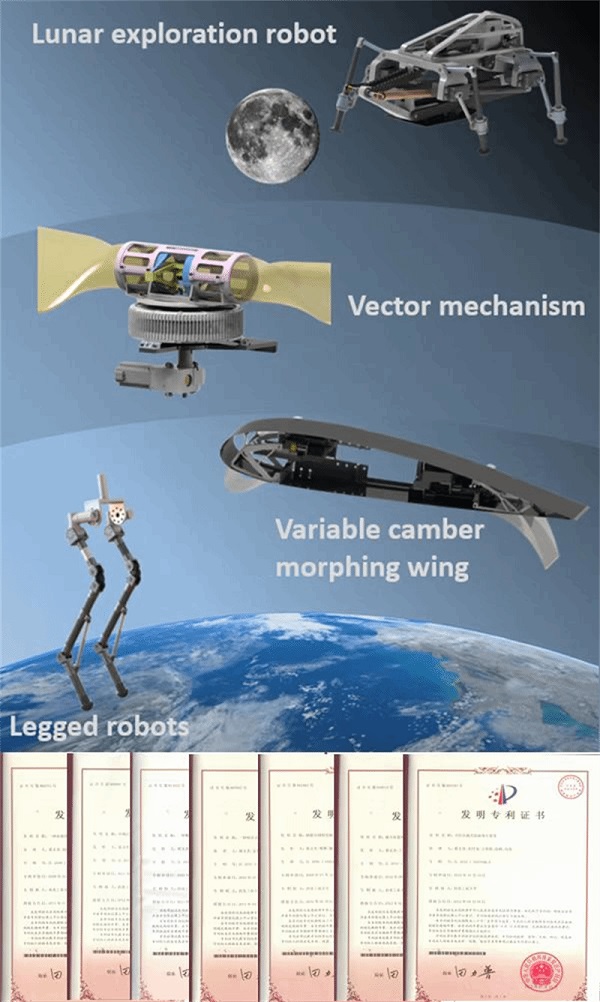
Ў°ҝЖСРТӘ·ҙІёҪМС§Ўұ
ФЪіРөЈБЛҙуБҝөДҪМС§ИООсЦ®УаЈ¬ёрОДҪЬ»№О§ИЖРЗГжСІКУМҪІвМшФҫ»ъЖчИЛЎўОҙАҙВМЙ«өНМјәҪҝХБмУтөДГс»ъұдРОТнөИ№ШјьјјКхҝӘХ№БЛТ»ПөБРЗ°СШРФСРҫҝЎЈЛыПИәуЦчіЦ№ъјТЧФИ»ҝЖС§»щҪрГжЙППоДҝЎў№ъјТ863јЖ»®ПоДҝөИ6ПоҝОМвЈ¬»№Йо¶ИЦчіЦБЛҝЖјјІҝҝЖјјИЛФұ·юОсЖуТөПоДҝәНГс»ъЧЁПо2ёцЧЁМвөИПоДҝЎЈФЪ·ВЙъМшФҫ»ъЖчИЛЎў·Й»ъұдРОТнөИБмУтИЎөГ№ъјТ·ўГчЧЁАы32ПоЈ¬ЖдЦРұдҫаВЭРэҪ¬өДұдҫа»ъ№№ФӯҙҙРФәЛРДјјКхФшҙъұнѧУІОХ№Ў°К®ИэОеЎ°№ъјТҝЖјјіЙҫНХ№ЎЈ
ёрОДҪЬІҝ·ЦСРҫҝіЙ№ыј°ЧЁАыЦӨКй
Ў°РРКЗЦӘЦ®КјЈ¬ЦӘКЗРРЦ®іЙЎЈҙуС§ҪМКҰУэИЛөД¶АМШУЕКЖҫНКЗҝЖСРЈ¬Из№ыЧФјә¶ФЗ°СШјјКхСРҫҝЙЩЈ¬ФхДЬТӘЗуС§ЙъҫЯУРҙҙРВРФЛјО¬Ј¬ЛщТФТӘІ»¶ПМбЙэҝЖСРЛ®ЖҪЈ¬ТФҝЖСР·ҙІёҪМС§ЎЈЎұ¶ФУЪСРҫҝЙъЕаСшЈ¬ёрОДҪЬМШұрЦШКУФЪҫЯМеПоДҝЦРЎўФЪёчАаҙҙРВҙҙТөҫәИьЦРЈ¬ТэөјС§ЙъАнВЫБӘПөКөјщЈ¬МбЙэҪвҫцОКМвөДДЬБҰЈ¬ПнКЬәПЧчөДАЦИӨЈ¬өГөҪДЬБҰЎўРДАнЛ«ЦШіЙіӨЎЈ
ёрОДҪЬУлС§Йъ
¶аДкАҙЈ¬ёрОДҪЬЦёөјС§ЙъНкіЙБЛ100¶аПо»ъРөҙҙРВЧчЖ·Ј¬ЖдЦРЎ°¶а№ҰДЬЧФЦъВЦТОЎұЎ°Л®әщВ«ҙтАМ»ъЎұөИҙҙРВЙијЖЧчЖ·Ј¬ПИәу»сИ«№ъҙуС§Йъ»ъРөҙҙРВЙијЖҙуИьТ»Ўў¶юөИҪұ13ПоЈ¬КЎј¶Т»Ўў¶юөИҪұ43ПоЈ»ЦёөјС§ЙъНкіЙЎ°»щУЪИЛ№ӨЖш¶ҜјЎИвЦъРРЖчЎұәНЎ°өШПВ№ЬөАЖМЙиОўРНҫтҪш»ъЎұөИ№ъјТҙуС§ЙъҙҙРВҙҙТөПоДҝ18ПоЈ¬АЫјЖ»сКЪИЁ·ўГчЧЁАы25ПоЈ¬ј«ҙуөШҙЩҪшБЛОТРЈҙҙРВИЛІЕөДЕаСшЎЈ
МТАоІ»СФ,ПВЧФіЙхиЎЈёрАПКҰөДСРҫҝЙъГЗТІҙу¶аСЎФсФЪёЯРЈИОҪМЈ¬Ў°Чг№»БЛҪвЈ¬ІЕёьёРёрАПКҰөДјбКШУлІ»ТЧЎЈОТПЈНыДЬПсЛыТ»СщЈ¬ЧцТ»ГыН¬С§ГЗҫҙЕеЎўПІ°®өДәГАПКҰЎЈЎұөзЧУҝЖјјҙуС§ҪМКҰЎўёрОДҪЬ16ҪмІ©КҝЙъОәН¬С§ЛөЎЈ
УөУР№ъјТј¶ҪМС§ГыКҰЎўұҰёЦУЕРгҪМКҰМШөИҪұЎўЙВОчКЎёЯРЈКҰөВҝ¬ДЈөИЦо¶аИЩУюЈ¬»сөГ№ъјТј¶ҪМС§іЙ№ы¶юөИҪұ2ПоәНКЎј¶УЕРгҪМС§іЙ№ыМШөИҪұ3ПоөИ¶аёц№ъјТј¶ҙуҪұ...... ЛдИЩУюөИЙнЈ¬ө«ёрОДҪЬіхРДКјЦХОҙёД©Ө©ӨЎ°іЙОӘТ»°С»рХХББС§ЙъЗ°РРөДВ·Ј¬ХвКЗЧчОӘАПКҰЧоҙуөДјЫЦөЎЈЎұ
ГҪМеұЁөА¶юЈә
ҙуөЁҙҙРВЈ¬КөПЦҝЖСРУлҪМС§ПаіӨ
ЎӘЎӘ·ГОчұұ№ӨТөҙуС§ёрОДҪЬҪМКЪ
ёрОДҪЬЈ¬Очұұ№ӨТөҙуС§ҪМКЪЈ¬І©КҝЙъөјКҰЈ¬ЦчТӘҙУКВ»ъРөЙијЖј°АнВЫЎў»ъРөЙијЖЦЖФмј°ЧФ¶Ҝ»ҜЎў»ъРөөзЧУЧЁТөөДҪМС§УлҝЖСР№ӨЧчЎЈЦчҪІұҫҝЖЙъЎ¶»ъРөФӯАнЎ·ЎўЎ¶»ъРөЙијЖ»щҙЎЎ·ҝОіМЈ¬ІўіРөЈСРҫҝЙъЎ¶ВМЙ«ІъЖ·ЙијЖЎ·ЎўЎ¶·ВЙъ»ъЖчИЛС§Ў·өИҝОіМөДҪМС§№ӨЧчЎЈ№ъјТ»ъРө»щҙЎҝОіМҪМС§»щөШёәФрИЛЈ¬»ъРөФӯАн№ъјТҫ«Ж·ҝОіМёәФрИЛЈ¬»ъРө»щҙЎҝОіМ№ъјТј¶ҪМС§НЕ¶УёәФрИЛЈ¬өЪИэҪмёЯөИѧУҪМС§ГыКҰҪұ»сөГХЯЎЈ
¶аДкАҙЈ¬ЛыКјЦХјбіЦТФҝЖСРҙЩҪМС§Ј¬ҙуөЁҪЁЙиҪМС§ЧКФҙЈ¬ҪМС§»·ҫіЈ¬ОӘОТ№ъЕаСшБЛҙуЕъёЯЛШЦКөДИЛІЕЎЈ
ҙәІҘМТАоИэЗ§ЖФ
ЗпАҙЛ¶№ыВъЙсЦЭ
ҙУ1987ДкБфРЈИОҪМЦБҪсЈ¬ёрОДҪЬТСҫӯФЪОчұұ№ӨТөҙуС§»ъРөАа»щҙЎҝОөДҪІМЁЙП¶И№эБЛ20¶аёцҙәЗпЎЈ
20¶аДкАҙЈ¬ёрОДҪЬіӨЖЪЦчҪІЎ¶»ъРөФӯАнЎ·ЎўЎ¶»ъРөЙијЖЎ·ј°Ў¶»ъРөЙијЖ»щҙЎЎ·өИұҫҝЖЙъҝОіМәНЎ¶іЭВЦДцәПФӯАнЎ·ЎўЎ¶ВМЙ«ІъЖ·ЙијЖЎ·ј°Ў¶·ВЙъ»ъЖчИЛС§Ў·өИСРҫҝЙъҝОіМЈ»ЦчіЦҪМУэІҝБўПоөД№ъјТ№ӨҝЖ»ъРө»щҙЎҝОіМҪМС§»щөШЎўҪМУэІҝРВКАјН»ъРөФӯАнНшВзҝОіМЎў»ъРөФӯАн№ъјТҫ«Ж·ҝОіМЎў»ъРөФӯАнЎ°К®ОеЎұј°Ў°К®Т»ОеЎұ№ъјТј¶ЦШөг№ж»®ҪМІДәНИ«№ъ»ъРөС§ҝЖ»ъРө»щҙЎАаҝОіМҪМС§ЧКФҙҝвЎӘЎӘ»ъРөФӯАнЧУҝвөИҪМёДУлҪМС§ҪЁЙиПоДҝЈ»ЦчіЦ№ъјТЧФИ»ҝЖС§»щҪрПоДҝј°№ъјТ863ПоДҝЈ»ЦчұаЎ¶»ъРөФӯАнЎ·ЎўЎ¶»ъРөФӯАнЧчТөјҜЎ·ЎўЎ¶»ъРөФӯАнөзЧУҪМ°ёЎ·ЎўЎ¶»ъРөФӯАнНшВзҝОіМЎ·өИЦҪЦКЎўөзЧУј°НшВзҪМІД№І10УаІҝЈ»ПИәу·ўұнҪМС§СРҫҝВЫОД20УаЖӘЈ¬»с№ъјТј¶ҪМС§іЙ№ы¶юөИҪұ2ПоЈ¬ЙВОчКЎј¶ҪМС§іЙ№ыМШөИҪұ2ПоәН¶юөИҪұ2ПоЎЈ
Ў°»щҙЎҝОҪМС§өДё¶іціЈіЈКЗОЮРОәНОЮөЧөДЈ»ФЪ¶МКұјдДЪјИҝҙІ»өҪіЙ№ыЈ¬УЦГ»УРё¶іцКұПЮЎЈТтҙЛЈ¬ҙУКВҪМС§№ӨЧчЈ¬УИЖдКЗҙУКВ»щҙЎҝОҪМС§№ӨЧчЈ¬ҫНТвО¶ЧЕТӘёКУЪјЕДҜЎўёКУЪН¶ИлөҪД¬Д¬ОЮОЕөДөгөО№ӨЧчЦРИҘЈ¬Гж¶ФЎ®УХ»уЎҜТӘөӯ¶ЁЧФИфЎЈЎұХвұгКЗёрОДҪЬ¶ФЧФјә20ДкҪМС§ҫӯСйөДЧЬҪбЎЈ
ұ§ЧЕ¶Ф»щҙЎҝОҪМУэөДТ»З»ИИіАЈ¬ёрОДҪЬФЪ№ӨЧчЦРІ»¶П»эАЫҪМС§ҫӯСйЈ¬ЦрІҪЙоИлСРҫҝҝОМвЎЈ
¶аДкАҙЛыјбіЦУГПЦҙъҪМУэјјКхКЦ¶ОёДФмҙ«НіөДҝОіМҪМС§·Ҫ·ЁЈ¬ФЪ»ъРөФӯАнҝОіМТСУРЦчҪМІДөД»щҙЎЙПЈ¬ЕдМЧҪЁЙиБЛПөБРёЁЦъҪМІДЎўөзЧУҪМІДәННшВзҝОіМЈ¬ФЪАПЎўЦРЎўЗаҪМКҰ¶аДкөД№ІН¬Е¬БҰПВЈ¬ёГҝОіМФЪ2003Дкұ»ҪМУэІҝЖАСЎОӘКЧЕъ№ъјТҫ«Ж·ҝОіМЈ¬2008Дкұ»ЖАОӘНшВзҪМУэ№ъјТҫ«Ж·ҝОіМЎЈБнНвЈ¬Лы»№НЁ№э¶Ф»ъРө»щҙЎПөБРҝОіМҪМС§ЧКФҙөДХыәПЈ¬ҙҙҪЁБЛҫЯУРЛШЦКУлҙҙРВҪМУэҪМС§МШХчөДҝӘ·ЕКҪҪМС§»·ҫіЎӘЎӘ»ъРө»щҙЎПөБРҝОіМҝӘ·ЕКҪС§П°КТәН»ъРөҙҙРВЙијЖҪМС§УлКөСйЦРРДЎЈФЪҙЩҪшС§ЙъЧФЦчС§П°ЎўФцЗҝС§Йъ№ӨіМЛШЦКәНҙҙРВДЬБҰөИ·ҪГжРОіЙБЛМШЙ«ЎЈ2004ДкОчұұ№ӨТөҙуС§№ъјТ»ъРө»щҙЎҝОіМҪМС§»щөШНЁ№эБЛҪМУэІҝЧЁјТөДЖА№АСйКХЈ¬Іўұ»ЖАОӘУЕРгЎЈ
И»¶шЈ¬ёрОДҪЬЙоЦӘЈ¬№вУРХвР©БјәГөДҪМС§ЧКФҙКЗФ¶Ф¶І»№»өДЈ¬ТӘЕаСшіцөВІЕјжұёөДС§ЙъЈ¬»№ұШРлЧўЦШҝОМГҪМС§·Ҫ·ЁәН¶ФС§ЙъС§П°·Ҫ·ЁөДЦёөјЎЈ
ОӘБЛҙЩҪшС§ЙъөДҙҙФмЛјО¬әНҙҙРВТвК¶Ј¬ЛыІ»¶ПөШ·бё»ЧФЙнөДЦӘК¶Ј¬ЧўТвОьКХҝЖјјөДЧоРВ·ўХ№УліЙ№ыЈ¬СР·ўБЛёЯЦКБҝөДҪМС§ЛШІДУлҝОјюЈ»ОӘБЛјӨ·ўС§ЙъөДҙҙФмЗұДЬЈ¬ЛыЖҪКұЧўТвКХјҜёчЦЦЗЙГоЙијЖөД№ӨҫЯЎўНжҫЯј°ИХіЈУГЖ·өИЈ¬ІўҪ«ХвР©¶«ОчДГөҪҝОМГЙПёшС§ЙъГЗХ№КҫЎўҪІҪвЈ»ОӘНШХ№С§ЙъөДЦӘК¶ГжЈ¬ҝӘА«С§ЙъСЫҪзЈ¬ЛыіЈіЈФЪҝОУаКұјдҙшЧЕС§ЙъИҘ»ъРө»щҙЎҪМС§»щөШЈ¬ҪшРРПЦіЎҪМС§Ј¬ҪІҪв»ъ№№өДЗЙГоЙијЖј°ҙҙРВөгЈ»Лы»№ҫӯіЈ№ДАшС§Йъ»эј«ІОјУҙҙРВҙуИь»о¶ҜЈ¬ЖфөПС§ЙъЧўТв·ўПЦЙнұЯөДОКМвЈ¬МбіцҙҙРВМвДҝЈ¬ІўҪшРРҙҙРВЙијЖәНЧчЖ·ЦЖЧчЈ¬ЕаСшС§ЙъөДҙҙРВДЬБҰЎў¶ҜКЦДЬБҰј°әПЧчҫ«ЙсЎЈ
ёрОДҪЬөДЕ¬БҰГ»УР°Ч·СЈ¬ЛыөГөҪБЛН¬С§ГЗөДТ»ЦВИПҝЙЎЈ¶аҙОұ»ЖАОӘЎ°С§ЙъЧоВъТвөДҪМКҰЎұЎЈ
Ў°ёрАПКҰҪМС§СПҪчЈ¬ҙУГҝТ»ҪЪҝОЦРОТГЗ¶јҝЙТФҝҙіцЛыөДҫ«РДЧјұёЎЈОЮВЫКЗөзЧУҪІТе»№КЗКөОпДЈРНЈ¬¶јУлҝООДДЪИЭЕдәПөГМмТВОЮ·мЎЈУРКұәтЛыДНРДөДҪІҝОЈ¬УРКұәтУЦ№ДАшОТГЗ»эј«ІОУлЈ¬Цч¶ҜЛјҝјЎЈҝОМГ»Ҙ¶ҜРФәЬЗҝЈ¬ОТГЗНкИ«Г»УРМоСјКҪөДёРҫхЎЈЎұ
Ў°ёрАПКҰФЪҪМС§ЦРәЬУРМШЙ«Ј¬ЛыІ»ҪцҪ«КйұҫЦРЦШТӘДЪИЭЧчБЛЧРПёөДҫ«ұЩ·ЦОцУлҪІҪвЈ¬ёьЦШТӘөДКЗЛыёьЧўЦШКөјКөДЎўЦұ№ЫөДҪМС§·ҪКҪЈ¬ЛыҫӯіЈҪ«Т»Р©»ъРөФӯАнөДЦӘК¶ФЪ№ӨіМЦРөДКөјКУҰУГЗйҝцТэИлҝОМГЈ¬АҙјӨЖрОТГЗөДС§П°РЛИӨЎЈЎұ
ЛыөДС§ЙъИзКЗЛөЎЈ
ҝЖСРОӘҪМУэІеЙПМЪ·ЙөДіб°т
ФшҫӯУРИЛІ»Ц№Т»ҙОөДОКёрОДҪЬЈәЎ°20¶аДкҪІЧЕН¬СщөДҝОіМЈ¬ДъІ»ёРөҪСб·іВрЈҝЎұ
Гж¶ФХвСщөДМбОКЈ¬ЛыөД»ШҙріцИЛТвБПЈәЎ°І»»бСб·іөДЈ¬»щҙЎҝОөДҪМС§ТІФЪЛжЧЕҝЖјјөД·ўХ№І»¶Пұд»ҜЈ¬РиТӘІ»¶ПМҪЛчУлҙҙРВЎЈЎұ
ёрОДҪЬЙоЦӘЈ¬ёЯөИѧУөДёщұҫИООсҫНКЗНЁ№эҪМС§№ӨЧчАҙЕаСшёЯІгҙОөДИЛІЕЈ¬ө«КЗТӘПлЕаСшіцёЯЛ®ЖҪөДҙҙРВРНИЛІЕЈ¬Г»УРҝЖСРөДЦ§іЕЈ¬ФтәЬДС¶ФС§ҝЖөДЗ°СШЎў¶ҜМ¬УРј°КұәНЙоИлөДХЖОХЈ¬ТІДСУЪМбёЯЦјФЪЕаСшҙҙРВДЬБҰөДҪМС§ЦКБҝЎЈТтҙЛЈ¬ТӘҫЎҝмёДұдТФНщ»щҙЎҝОҪМКҰС§ҝЖБмУтЦӘК¶ГжХӯЈ¬ҝЖСРДЬБҰИхөДҫЦГжЈ¬К№»щҙЎҝОҪМКҰУЙҪМС§РНПтҪМС§УлҝЖСРІўЦШәНҙҙРВРНҪМКҰөДЧӘұдЈ¬К№ҪМКҰөДҪМС§№ӨЧчЎўҝЖСР№ӨЧчУлҙҙРВРНИЛІЕЕаСш№ӨЧчПа»ҘҙЩҪшЈ¬ҙпөҪҪМСРПаіӨЈ¬ҝЖСРҙЩҪшҪМС§өДДҝөДЎЈ
ОӘҙЛЈ¬ЛыҙшБмҪМС§НЕ¶УҙУТФПВјё·ҪГжИлКЦЈәТ»КЗККөұіРөЈЧЁТөҪМС§№ӨЧчЈ¬НШҝнЧЁТөЦӘК¶Ј¬јУЗҝ»щҙЎУлЧЁТөөДИЪәПЈ»¶юКЗ№ДАшҪМКҰ»эј«ІОУлЦёөјС§ЙъҙҙРВЙијЖәНҝОНвҝЖС§СРҫҝ»о¶ҜЈ¬ФцЗҝҪМКҰөДҙҙРВЛјО¬Ј¬МбёЯҙҙРВҪМС§ДЬБҰЈ»ИэКЗВхіцұҫС§ҝЖБмУтЈ¬УВУЪҝзС§ҝЖәНҙҘј°РВРНҝЖСРБмУтЈ¬БЛҪвөұЗ°№ъјКЙПұҫС§ҝЖј°Па№ШС§ҝЖБмУтЈ¬МШұрКЗҪ»ІжС§ҝЖәНРВРНС§ҝЖБмУтөДСРҫҝ¶ҜПтәНЗ°СШ·ҪПтЈ¬ХТіцЧФјәөДСРҫҝ·ҪПтЈ»ЛДКЗЧЯіцРЈГЕЈ¬јУЗҝУлЖуТөөДБӘПөЈ¬БЛҪв№ъјТөДҝЖјј·ўХ№әНҫӯјГҪЁЙиөДКөјКРиЗуЈ¬Н»іцЧФЙнөД»щҙЎУЕКЖЈ¬И·¶ЁЧФјәөДСРҫҝҝОМвЈ¬»эј«ХщИЎҝЖСРПоДҝЎЈ
ҪьДкАҙЈ¬НЕ¶УҪМКҰөДҝЖСР№ӨЧчәНҝЖСРДЬБҰУлС§КхЛ®ЖҪөГБЛәЬҙуН»ЖЖЈ¬НЕ¶УҪМКҰЦчіЦөД»щҪрПоДҝ20УаПоЈ¬іРөЈәбПтҝОМв 10УаПоЎЈҝЖСРЧЬҫӯ·Сҙп1700НтФӘЈ¬ј«ҙуМбЙэБЛҪМКҰөДҝЖСРДЬБҰәНС§КхЛ®ЖҪЎЈёрОДҪЬұҫИЛТІФЪЙоИлБЛҪвұҫС§ҝЖ»ъ№№С§Ўў»ъЖчИЛөИСРҫҝБмУтөДЗ°СШ·ҪПтөД»щҙЎЙПЈ¬ҪбәПәҪҝХЎўәҪМмөИБмУтҝЖјјөД·ўХ№Ј¬ФЪРОЧҙұд»ҜЧФККУҰҪб№№јјКхәН·ВЙъ»ъЖчИЛјјКхөИСРҫҝ·ҪПтЙПЈ¬ПИәуХщИЎІўЦчіЦБЛ№ъјТЧФИ»ҝЖС§»щҪрПоДҝ3ПоЈ¬№ъјТ863јЖ»®ПоДҝ1ПоәНҪМУэІҝІ©Кҝөг»щҪр1ПоЈ¬ІўУлЖуТөҪбәПЈ¬ЦчіЦ№ъјТҝЖјјІҝҝЖјјИЛФұ·юОсЖуТөјЖ»®ПоДҝТФј°ҙу·Й»ъөИәПН¬ПоДҝөИЈ¬·ўұнС§КхВЫОД50УаЖӘЈ¬ЙкұЁ№ъјТ·ўГчЧЁАы10УаПоЈ¬ТС»с2ПоЈ¬ЙкұЁКөУГРВРНЧЁАы10УаПоЈ¬ТС»с7ПоЈ¬»сИнјюЦшЧчөЗјЗ12ПоЎЈ
ҝЖСРДЬБҰөДМбёЯЈ¬К№өГЛыФЪҪМС§ЙПёьјУөГРДУҰКЦЎЈЛыіЈіЈ°СҝЖСРіЙ№ыҙшИлҝОМГЈ¬ідКөҝОМГДЪИЭЈ¬°СЧоРВөДЦӘК¶әНРЕПўҙ«өЭёшС§ЙъЈ¬КөПЦ¶ФҪМС§ДЪИЭөДІ»¶ПёьРВЈ»ЛыҪ«ЧФјәөДҝЖСРіЙ№ыј°ҙҙРВПоДҝіЙ№ыИЪИлөҪұаРҙіц°жөДҪМІДЦРЈ¬јУҙуБЛҙҙРВЛјО¬ЕаСшөДБҰ¶ИЈ»Лы№ДАшС§Йъ»эј«ІОјУҙҙРВКөјщ»о¶ҜЈ¬ЦёөјБЛ6ПоЎ°№ъјТҙуС§ЙъҙҙРВКФСйјЖ»®ПоДҝЎұЎў60УаПо»ъРөҙҙРВҙуИьЧчЖ·Ј¬ІўТӘЗуҪшРРұҫҝЖұПТөЙијЖөДС§ЙъЦұҪУІОУлөҪҝЖСР№ӨЧчЦРЈ¬К№ҙуС§ЙъГЗҙУЦРөГөҪБЛКөјКДЬБҰј°ҙҙРВДЬБҰөД¶НБ¶ЎЈ
ҪьДкАҙЈ¬ЛыЛщЦёөјөДС§ЙъПИәуЙијЖіцБЛ·ҪРОЗшУтЕз№аБъН·ЎўёЯВҘЧФҫИЖчЎўёЯВҘНвЗҪГжІБПҙ»ъЎў¶а№ҰДЬЧФЦъВЦТОЎў¶а№ҰДЬЧФЦъ»ӨАн»ъЎўЛ®әщВ«ҙтАМ»ъЎўҝЙ»ШКХІјёжЦҪөДІјёжАёЎўЕАұЪ»ъЖчИЛЎў¶а№ҰДЬұдЦ§өгЧФЦ§іЕҝЙЧйЧ°КҪЗЛёЬЎўХЫөюКҪО»ЧЛҝЙөчөЈјЬөИКэК®ПоҙҙРВЙијЖЧчЖ·Ј¬ПИәу»сИ«№ъҙуС§Йъ»ъРөҙҙРВЙијЖҙуТ»өИҪұ2ПоәН¶юөИҪұ3ПоЈ¬КЎј¶Т»Ўў¶юөИҪұ23ПоЎЈ
ҝЖСРУлҪМС§Ј¬ҫҝҫ№КЗПа»ҘҙЩҪш»№КЗПа»ҘЕЕівЈ¬ЦБҪсИФДСУР¶ЁВЫЈ¬ө«КВКөКЗЧоәГөДЦӨГчЎЈёрОДҪЬУГЧФјә20УаДкөДҪМС§ҫӯСйПтОТГЗЦӨГчБЛҝЖСРКЗМбёЯҪМС§ЦКБҝөДНЖҪшЖчЈ¬ТФҝЖСРҙЩҪшҪМС§КЗМбёЯҙуС§ҪМС§ЦКБҝөДЦШТӘНҫҫ¶ЎЈ
АҙФҙЈәЎ¶ҝЖС§ЦР№ъИЛЎ·2010ДкөЪ7ЖЪ
|
|